La automatización, que puede definirse como un proceso que se controla por sí mismo, sin necesidad de un control directo humano, no es nueva. Hace muchos años que las luces del alumbrado público se encienden automáticamente al anochecer. El distribuidor del sistema de encendido de un auto, es un programa mecánico que envía tensión eléctrica a las bujías en un orden y en un momento exacto para producir una explosión en la mezcla combustible. Un esquema simplificado del funcionamiento de un distribuidor mecánico con 2 focos lo representamos con 4 posiciones:
La leva conectada al polo negativo gira y al tocar el contacto positivo cierra el circuito. Alternadamente se cierra el izquierdo y luego el derecho. La velocidad de giro determinará el tiempo que tarda en encender y el tiempo que dura el encendido.
Un distribuidor de un auto tiene 4 circuitos, 1 por cada bujía. El eje central gira mecánicamente cerrando y abriendo serialmente uno a uno los circuitos. Esto es lo que llamamos un «programador mecánico», que automatiza una secuencia de encendidos.
En nuestro contexto de robótica, donde utilizamos una interfaz con salidas para los focos y un lenguaje basado en FMS LOGO que llamamos NEOTEC, donde se han definido una cantidad de seudo primitivas para comunicarse con la interfaz, el proceso anterior sería reemplazado por un procedimiento:
En el procedimiento DISTRIBUIR, :X es una variable que definirá el tiempo de encendido e :Y otra variable que definirá el tiempo de espera entre encendido y encendido. El procedimiento además define que el tiempo de encendido es el mismo para ambos focos (:X) . Por ejemplo se podrá accionar:
DISTRIBUIR 10 100
DISTRIBUIR 100 1000
Finalmente DISTRIBUIR es un ciclo, loop o recursión que equivale a la rotación (loop) de la leva mecánica.
SEUDOPRIMITIVAS
Se denominan así comandos (o automatismos) que se ocultan a la vista del programador, mediante el comando TAPA (Bury) y que se pueden utilizar como «primitivas» sin riesgo de que sean modificadas por el usuario. Por ejemplo la seudoprimitiva SALIDA, cuya función es activar una de las salidas de tensión, tiene la siguiente definición:
PARA SALIDA :n
si numero? :n [
haz «n int :n ; el valor de n solo puede ser entero, podría poner salida 2.5 pero equivaldría a salida 2
si :n > 4 [alto]; las salidas son 4 y los valores permitidos son 1, 2, 3 y 4
si :n < 1 [alto]; las salidas son 4 y los valores permitidos son 1, 2, 3 y 4
haz «qwe potencia 2 :n-1
]
si lista? :n [ ; pueden activarse 2 o más salidas. Por ejemplo SALIDA [1 4]
haz «qwe 0
mientras [(cuenta :n) > 0] [haz «asd (desapila «n) sisino no numero? :asd [alto] [haz «asd :asd – 1] si :asd < 0 [alto] si :asd > 3 [alto] haz «qwe :qwe + potencia 2 int(:asd) si miembro? :asd :n [quita :asd :n]]
]
si :qwe > 0 [ dllcall frase [v TalkMotor w ] :qwe ] ;llamada a ejecutar una DLL
FIN
En el caso de las seudoprimitivas E (encender) y A (apagar) que funcionalmente son un interruptor que se abren y cierran el circuito de la salida previamente activada, el código es:
PARA E
dllcall [v MotorOn]
fin
PARA A
dllcall [v MotorCoast]
fin
Donde MotorOn Y MotorCoast son DLLs previamente programadas y almacenadas en un archivo DLL.
Como se puede observar el proceso de comunicación no es muy amigable. De manera que la seudoprimitiva permite al docente «programador», si fuese necesario, acercar el nivel de dificultad a la capacidad del alumno «programador». Cada primitiva LOGO (AV RE GD GI) tiene la misma función. Como todo automatismo se trata de lograr ejecutar un proceso complejo mediante una comunicación simple: una palabra o un click. Un interrogante del docente construccionista es si el automatismo sirve para que el alumno potencia su pensamiento o si lo sustituye al punto que no hay que pensar.
Las seudoprimitivas a diferencia de las primitivas pueden «visualizarse» mediante el comando DESTAPA. Por ejemplo si escribimos: DESTAPA [SALIDA], y luego vamos al editor veremos:
LOS PILARES DE LA AUTOMATIZACIÓN DIGITAL
La automatización digital ha reemplazado los automatismos electromecánicos por sistemas electrónicos. los 3 pilares de la automatización son ahora:
La ELECTROMECÁNICA es la fuerza bruta. La que multiplica el esfuerzo del hombre, o sustituye sus músculos y herramientas. Es heredera de la Revolución Industrial.
La ELECTRÓNICA es la física de los circuitos miniaturizados de baja tensión, y del lenguaje eléctrico digital. Su función es controlar la electromecánica. Es heredera de la Revolución del Transistor.
Finalmente el SOFTWARE es el lenguaje con que se programa la ELECTRÓNICA para que controle la MECÁNICA. No es novedosa, pero es actualmente la preocupante heredera de la Inteligencia Artificial. Así como las máquinas reemplazaron al hombre en sus funciones mecánicas, los Sistemas Inteligentes lo están reemplazando en sus funciones superiores. Como dice Nicolas Carr en su perturbador libro ATRAPADOS, los pilotos de avión ya no controlan los aviones, sino a las computadoras que controlan los aviones. En un futuro no muy lejano, quizás también sean reemplazados por las máquinas inteligentes.
EL CAMINO DE LA ROBÓTICA EDUCATIVA
Casi puedo ver los «engranajes» que movieron al Dr. Seymour Papert a crear el contexto de aprendizaje que denominamos Robótica Educativa: «Los engranajes de su infancia», el «construccionismo» donde la tecnología es virtuosa si provee mejores caminos para el aprendizaje, los proyectos y conclusiones de la entonces naciente Inteligencia Artificial, los postulados del constructivismo, el ideario del MIT, «Mens et manus» (Mente y manus). La resultante casi obvia e inexorable fue la «robótica educativa», de la que el lenguaje Logo fue una primer etapa, ya que obviamente la tortuga fue la representación virtual de un tipo de robot y el Logo un lenguaje amigable para programarla (Software).
En este contexto de aprendizaje, me inicié en el año 1988 y fui modelando una pedagogía, una didáctica y una secuencia de dificultades partiendo de los proyectos constructivos (manus) que fuimos resolviendo con los alumnos, así como del entorno en que desarrollo mi profesión.
En este contexto fascinante está implícitos y/o explícitos los 3 pilares de la automatización digital, cuyos contenidos incluyen a los de la robótica, de manera tal que un proyecto de automatización puede no tener nada que ver con un robot.
PILAR IMPLÍCITO: LA ELECTRÓNICA
En forma implícita está la electrónica. Me muevo en un colegio que no es «técnico» y yo tampoco lo soy. No trabajamos con los alumnos «la electrónica», ésta está contenida en la interfaz (y por supuesto en la PC). La interfaz es una «caja negra», un instrumento del que no sabemos qué pasa dentro, o mejor dicho sabemos lo que pasa al nivel de Input y Output, lo que entra y lo que sale. Lo que no sabemos y está guardado celosamente en los circuitos, es el cómo.
SALIDAS Y ENTRADAS
La interfaz actual se conecta a la PC a través de un puerto USB. Tiene 4 salidas de tensión (entre 1 y 12 volts), con inversión de polaridad. Los conectores son del tipo minidin y permiten la conexión de focos, leds, electroimanes, bombas de agua, motores, servomotores, motores paso a paso y servomotores (aunque en este caso su funcionamiento no es confiable). En principio estos dispositivos deben funcionar con un tope de 12 Volts. Pero veremos que gracias al RELAY, que es un elemento que permite controlar un circuito de alta tensión (220 Volts) mediante un circuito de baja tensión (12 Volts), es posible conectar casi cualquier aparato eléctrico (ventilador, luz ambiente, radio, calentador) siempre y cuando el consumo no supere los 2 Amperes.
A la derecha de la imagen pueden verse el sector con las 6 ENTRADAS, con conectores plugs, que permiten la conexión de sensores del tipo resistivos: posición (interruptores), temperatura, luz, proximidad y casi cualquier variable que provoque un cambio en la resistividad y por lo tanto un cambio del voltaje interno de la interfaz.
PILAR EXPLÍTICO: EL SOFTWARE
Como ya expliqué los alumnos trabajan con un lenguaje creado por los docentes (y expertos en programación) basado en el FMS LOGO, que entre otras funciones tiene la posibilidad de comunicarse con los puertos de E/S. Este «post lenguaje» bautizado NEOTEC permite la programación de la electromecánica conectada a las SALIDAS de tensión y de los sensores conectados a las ENTRADAS.
El post lenguaje se adiciona a todo el lenguaje del FMS LOGO y por supuesto mantiene el paradigma modular tan útil tanto para la programación en sí, como para la formación de un pensamiento organizado.
PILAR EXPLÍCITO: LA ELECTROMECÁNICA
Desde 1° grado están presentes los contenidos de electricidad y construcción. En 5° grado se introduce a los alumnos en los mecanismos: sus componentes, sus funciones y aplicaciones y su construcción. En 5° utilizando material Lego y a partir de 6° grado, con material Meccano.
AUTOMATIZACIÓN
Este contenido se empieza a trabajar en 1° año con la aplicación casi exclusiva de sensores de 2 estados (interruptores), que funcionan como sensores de posición o de fin de carrera. Estos sensores tienen 2 estados: cerrado y abierto. Cerrado la tensión interna es de aproximadamente 5 Volts y abierto es de aproximadamente 0 Volts. El comando (seudoprimitiva) esencial para la programación con sensores es VOLTAJE que reporta la tensión de la entrada activa. Por ejemplo el procedimiento TESTEASENSORES:
PARA TESTEASENSORES
ENTRADA 1 ES VOLTAJE
ENTRADA 2 ES VOLTAJE
ENTRADA 3 ES VOLTAJE
ENTRADA 4 ES VOLTAJE
FIN
Si quisiera que los 4 valores se escribiesen en una sola línea:
PARA TESTEASENSORES
ENTRADA 1 MAKE «V1 VOLTAJE
ENTRADA 2 MAKE «V1 VOLTAJE
ENTRADA 3 MAKE «V1 VOLTAJE
ENTRADA 4 MAKE «V1 VOLTAJE
(ES :V1 :V2 :V3 :v4)
FIN
Podría obtener el siguiente resultado
0.0034
0.0041
0.0039
0.0044
Los 4 valores corresponden al voltaje de una de las entradas y son todos aproximadamente 0.
0.0034 0.0041 0.0039 0.0044
PROYECTOS CONSTRUCTIVOS EN 1° AÑO
Los proyectos que llevamos a cabo tienen siempre un componente lúdico, un contenido geo social y/o basado en sistemas reales. Por ejemplo una maqueta automatizada del transbordador Nicolás Avellaneda ubicado en el barrio de la Boca. (VER VIDEO: TRANSBORADOR)
PROYECTOS CONSTRUCTIVOS EN 2° AÑO
En 2° año se introducen sensores resistivos cuyo voltaje es una función del estímulo (luz, temperatura, proximidad, acidez, etc.) y puede tomar valores entre 0 y 5 volts. En estos proyectos la complejidad mecánica cede paso a la complejidad de la programación. (VER VIDEO: CRIATURAS SENSIBLES)
3° AÑO – AUTOMATIZACIÓN Y CONTROL AMBIENTAL
Finalmente en 3° año se aplican todo tipo de sensores para automatizar el control de un ambiente. Siempre basado en un sistema real: por ejemplo el sistema de manteniniento por frío de las momias del Llullailaco, construido en el Museo de Alta Montaña de Salta o el que describo a continuación basado en el sistema de igualación de temperaturas en el Observatorio La Silla, emplazado en el cerro homónimo en el desierto de Atacama, Chile. En esta etapa la programación incluye la creación de memorias globales para almacenar datos, las comparaciones múltiples y ciclos anidados en ciclos.
En el primer video presentamos la problemática general del observatorio e incluye trabajos de animación que recrean la situación.
En el segundo, la forma que adoptó el proyecto de construcción (quizás incompleto o más que nada simbólico dado el tiempo disponible), su programación y funcionamiento.
VIDEO 1: INTRODUCCIÓN
VIDEO 2: REPRESENTACIÓN MECÁNICA Y PROGRAMACIÓN
ACLARACIÓN: Quizás no haya quedado claro la función del foco interior y su relación con el Sol. Lo que presento es una simulación de la problemática del Observatorio que se debe ejecutar en un tiempo sensiblemente inferior al de 24 hs. Podríamos haber utilizado un foco externo a modo de «Sol», pero a diferencia del obervatorio real construido con materiales que absorben el calor con velocidad, nuestro «domo» es de telgopor, un aislante térmico. Por otro lado el calentamiento del interior debía producirse en cuestión de minutos. Por esa razón reemplazamos el «Sol» por un foco adentro del domo. que cumple la función de calentar el interior de la construcción con bastante velocidad.
4° AÑO. CONTROL DE EXPERIENCIAS
Finalmente nuesta secuencia finaliza orgánicamente en 4°, con la aplicación de sensores y la programación de un toma de datos prolongada en el tiempo dentro de una experiencia, frecuentemente relacionada con el intercambio de calor, debido en parte al buen funcionemiento obtenido con los sensores termoresistivos.
Pero eso es material para otro POST.
En el campo educativo quizás falte mencionar otros pilares: La imaginación y su soporte, el conocimiento. El conocimiento nos permite ver lo que no se ve, e imaginar como podría ser. Fue lo que me pasó cuando visité el MAAM (Museo de Alta Montaña) en la ciudad de Salta y quedé maravillado por la exposición y la historia de las momias del Llullaillaco. Enseguida empecé a imaginar cómo podríamos recrear ese increíble sistema de conservación con los conocimientos y materiales que teníamos. El conocimiento tecnológico, fue en este caso claramente potenciador y no sustituyente. Como en el caso del Observatorio, permitió activar MENS ET MANUS.
El Instituto Tecnológico de Massachussets (MIT), situado en la ciudad de Boston, fue inaugurado en 1861, pero su apertura académica fue demorada hasta 1865 debido a la Guerra Civil. En 1866 Domingo F. Sarmiento se hallaba en EEUU como Ministro Plenipotenciario y como tal fue testigo de la inauguración del telégrafo que unía Washington con Europa por medio del primer cable telegráfico transatlántico (en realidad era el 2°, ya que pocos años antes se había inaugurado uno que funcionó unos pocos meses).
En sus orígenes el MIT utilizó el modelo de universidades politécnicas e hizo hincapié en la instrucción de laboratorio. El énfasis inicial de MIT, en la tecnología aplicada en los niveles de grado y posgrado condujo a una estrecha cooperación con la industria. Las reformas curriculares de 1930 volvieron a hacer hincapié en la investigación científica básica. Su lema es «Mens et Manus», «Mente y manos», que sintetiza bien algunos principios educativos que hemos aprendido del Dr. Papert, como la importancia del «aprender haciendo» o «que el conocimiento se ponga en acción», lo que deriva en «la metodología de taller», y la neurociencia definiría ahora como «la unión de lo semántico y lo episódico».En la actualidad consta de 5 escuelas y 1 facultad:
Escuela de Ciencia del MIT
Escuela de Ingeniería del MIT
Escuela de Arquitectura y Planeamiento del MIT
Escuela de Administración Sloan del MIT
Escuela de Humanidades, Artes y Ciencias Sociales del MIT
Facultad de Ciencias de la Salud y Tecnología Whitaker
EL LABORATORIO DE INFORMÁTICA E INTELIGENCIA ARTIFICIAL (CSAIL)
En el 2003 se crea el «Laboratorio de Informática y Inteligencia Artificial» (CSAIL) formado por la fusión del Laboratorio de Informática y el Laboratorio de Inteligencia Artificial. CSAIL es el laboratorio más grande en el campus del MIT, medido por el alcance de la investigación y la membresía. Además, CSAIL alberga el World Wide Web Consortium (W3C). Allí se investiga y desarrollan proyectos de la siguientes especialidades:
Inteligencia artificial
Biología Computacional
Gráficos y visión
Lenguaje y aprendizaje
Teoría de la computación
Robótica
Sistemas (incluye arquitectura informática, bases de datos, sistemas distribuidos, redes y sistemas en red, sistemas operativos, metodología de programación y ingeniería de software entre otros.)
Su ubicación es también muy particular. Se halla dentro del llamado MIT Stata Center, un edificio «increíble» inaugurado en el 2004 con un diseño del singular arquitecto canadiense Frank Ghery (n. 1928), exponente del deconstructivismo.
El MIT State Center aloja además del CSAIL, el Laboratorio de Sistemas de Información y Decisión (LIDS) y el Departamento de Lingüística y Filosofía. Creo que Papert estaría feliz con esta unión.
VISITA VIRTUAL AL MIT
Aprovechemos la tecnología del Google Earth para visitar el MIT.
SARMIENTO Y BOSTON
La relación de Sarmiento con la ciudad de Boston se inicia en su primer viaje al país del Norte en 1847 cuando la visita y queda admirado por el sistema educativo y el grado de desarrollo cultural que la ciudad había alcanzado. La Universidad de Harvard había sido fundada en 1636. En Boston Sarmiento traba amistad con Horace Mann, quien se desempeñaba como una especie de Ministro de Educación de Massachussets, y es considerado «el padre de la escuela pública» en EEUU. Es clara la relación entre el pensamiento de ambos próceres. Un breve pero sustancioso artículo sobre las relaciones y la influencia entre Boston y Sarmiento puede leerse en este artículo del Ing. Horacio C Reggini publicado en el diario La Nación. Boston una de las claves de Sarmiento
Sarmiento y Horace Mann
SARMIENTO, REGGINI Y PAPERT
El Ing. Horacio C Reggini, fue amigo y el «alter ego» argentino de Seymour Papert. Nos transmitió la ideas del construccionismo y aportó su propia cosecha de argumentos y libros para sostener la ideas originadas en el MIT. Tradujo al castellano las primeras versiones de LOGO para TI 99.
Fue promotor de la instroducción de las computadoras en la educación y asesor desde 1981 hasta entrada la década del 90 del colegio Bayard. Aunque para ser más exactos esa función de asesoramiento la cumplió el estudio Fernández Long y Reggini junto a un equipo de profesionales que nos formó en el dominio del lenguaje. Pero siempre fue Horacio quien más cerca estuvo de nosotros y quien más esfuerzos dedicara a la expasión del Logo en Argentina y América Latina.
También publicó varios libros importantes en ese momento fundacional: Alas para la Mente, Creatividad o automatismo, Ideas y formas: Logo tridimensional.
Personalidad de la cultura, la ciencia y la educación, sus aportes pueden seguirse y consultarse en su sitio curiosamente llamado LA BODEGA COMÚN. Allí en la sección estantería de libros podemos encontrar los textos publicados por la Editorial Galápagos, una de sus creaciones.
LOS CAMINOS DE LA PALABRA
De 1996 es su libro LOS CAMINOS DE LA PALABRA, las telecomunicaciones de Morse a Internet. Han pasado 20 años de su primera edición, pero siempre me ha parecido un libro deslumbrante, muy especialmente porque descubre la pasión de Sarmiento por el telégrafo y la asombrosa tarea realizada durante su presidencia (1868 1874) donde se constuyeron casi 6000 km de líneas telegráficas.
Los «caminos de la palabra» es una expresión del que fuera su ministro del interior y brazo ejecutor de su plan: Dalmacio Vélez Sarsfield, en una circunstancia controvertida que el libro de Reggini relata. Efectivamente, habiéndose quedado sin recursos para terminar los ambiciosos planes de unir al país y el país con el mundo por medio de las líneas telegráficas, Vélez Sarsfield utiliza fondos asignados en el presupuesto para la construcción de caminos para la construcción de las primeras. Eso le vale una interperlación del Congreso y es, ante esa inerpelación, que argumenta que el desvío estaba justificado porque las líneas telegráficas eran también caminos, los Caminos de la Palabra.
La importancia del telégrafo en el siglo XIX tiene su correspondencia con la de Internet en nuestra actualidad. El cable telegráfico transportaba señales montadas en pulsos eléctricos, así como lo hacen ahora los cables de fibra óptica alrededor del mundo en paquetes de luz. Estudiar a Morse para entender Internet tiene más de un sentido positivo. El lenguaje MORSE también es un lenguaje eléctrico y binario, ya que todos sus significados se codifican con 2 señales eléctricas que difierene en su duración, una de larga duración y otra de corta duración. Esas señales se representan y nombran como RAYA y PUNTO. La duración de la RAYA es 3 veces la del PUNTO. Mientras Samuel Morse luchaba para crear un emisor transmisor y receptor confiable, un miembro de su equipo de trabajo Alfred Veil, diseñó un simple código basado en esas 2 señales básica. A cada letra, número y signo de puntuación le hizo corresponder una combinación diferente de RAYAS y PUNTOS.
El lenguaje de las computadoras utiliza otro código denominado ASCII (American Standar Code Interchage Information), que también está conformado por 2 señales eléctricas que difieren. no en la duración, sino en el voltaje. Una señal de alta tensión (∼ 5 volts) representada con un 1 y denominada BIT ALTO y una señal de baja tensión ( ∼ 0 volts) representada con un 0 y denominada BIT BAJO.
La analogía es asombrosa y más allá de su interés histórico, es un buen camino empezar a entender el código ASCCI a partir de un código que utiliza componentes eléctricos más concretos y visibles.
EN EL PRINCIPIO ERA EL LOGOS
Si eliminamos el contenido histórico del término, autoría de Vélez Sarsfield, la frase «los caminos de la palabra» tiene en sí misma un contenido poético y en cierta forma muy relacionada con el LOGO, con el ideario de Papert y el lema del MIT. El evangelio de Juan cuyo original fue escrito en griego, comienza diciendo «En el Principio era el LOGOS, donde LOGOS es un concepto filosófico que puede traducirse como «palabra», reflexionada o razonada, es decir: «razonamiento» o «discurso». También puede ser entendido como: «inteligencia», «pensamiento», «sentido». Es un concepto polisémico y complejo. En la traducción al castellano fue reemplazada por la palabra VERBO: «En el principio era el VERBO». El Verbo es una palabra y una acción, como si fuera un comando LOGO. En el principio era la palabra creadora y transformadora. Palabra y acción, Mens et Manus.
SARMIENTO, MENS ET MANUS
Los Caminos de la Palabra es el nombre que le hemos dado a la unidad implementada en 7° grado, donde se estudia la evolución de las telecomunicaciones y se realizan diversas actividades mediadas por recursos computacionales o materiales de construcción. En el 2016 se hizo un énfasis en las líneas construidas durante el gobierno de Sarmiento y la programación del código Morse.
Considerado como uno de los más grandes escritores argentinos, pensador, docente y autodidacta, Sarmiento pensó la Argentina en función de futuro y sobre todo las cosas fue un hombre de acción. Según Borges, Sarmiento el soñador nos sigue soñando. Es un personaje frecuentemente atacado a menudo con ignorancia y maldad. No se trata de desconocer sus desaciertos o sus debilidades, que las tuvo, sino que en el tiempo que le tocó vivir y actuar, su labor fue descomunal y en favor del progreso del país. En 1866 cuando se inaugura el primer cable telegráfico por debajo del Atlántico (en realidad fue el 2°, pero el 1° duró muy poco) que unió EEUU con Europa, Sarmiento era embajador en el país del norte y fue testigo de ese hecho épico que era un símbolo de la modernidad. Armado con el convencimiento de que la tecnología y las telecomunicaciones eran sinónimos de progreso, asume la presidencia en 1868. Encuentra entonces que sólo había una línea telegráfica que unía Buenos Aires con Montevideo, construida por capitales privados. Al mes de asumir comienza una carrera contra el tiempo para comunicar al país conocido en esos momentos (la Patagonia era un entelequia). Sin intención de hacer un panegírico de su persona, lo cierto es que objetivamente durantes sus 6 años de gobierno se tendieron más de 6000 km de cable, uniendo las principales regiones del país. Se inició también lo que bien podría considerarse el primer proyecto del Mercosur, ya que el cable de Buenos Aires, llegó a través de Uruguay y Brasil y luego cruzando el Atlántico, hasta Europa. En 1874, pocos días antes de terminar su mandato, Sarmiento inauguró las telecomuncaciones con el viejo continente. Su mensaje contiene la profética frase: «Un saludo cordial a todos los pueblos que se hacen, por el intermedio del cable, una familia sola y un barrio».
En el video sobre el proyecto realizado en el Colegio Bayard pueden encontrar detalles de ese plan y su concreción y aquellos que quieran profundizar el tema pueden acudir al libro del Ing. Reggini, «La obsesión del hilo» – Sarmiento y las telecomunicaciones.
PROYECTO: LOS CAMINOS DE LA PALABRA
Todos los años estudiamos la evolución de las telecomunicaciones, haciendo énfasis en el telégrafo y en la especial contribución del notable Samuel Morse. El sistema Morse es mucho más que el código que lleva su nombre.
Básicamente es un circuito eléctrico, conectado por una fuente de tensión (batería) y controlado por un «interruptor» (tecla) manipulado por una persona (el emisor). Del otro lado de la línea el receptor tenía un rollo de cinta de papel que circulaba debajo de un lápiz que subía y bajaba por la fuerza de un electroimán que se activaba cuando el emisor cerraba el circuito bajando la tecla.
SUBE LÁPIZ – BAJA LÁPIZ
Tortuga Valiant
Es notable que es el mismo sistema que utiliza la vieja tortuga robot Valiant, cuyo marcador subía y bajaba mediante los comandos SL y BL (Sube lápiz y Baja lápiz). Esta analogía fue utilizada, como veremos en la programación de la emisión de un mensaje en Morse.
MENS ET MANUS I
Como todo proyecto construccionista, el conocimiento debe ponerse en acción siguiendo la premisa Mens et Manus, o como diría la neurociencia, las «memorias semánticas» deben convertirse en «memorias episódicas», que son más fuertes y duraderas. En nuestro proyecto seguimos 2 caminos:
1 – Constructivo.
Construcción de circuitos eléctricos. Como vimos el sistema Morse es un circuito eléctrico manipulado por un interruptor. La construcción de diferentes tipos de circuitos con diferente tipos de interruptores es no sólo un camino para entender el telégrafo, sino para poner en acción competencias y conocimientos previos y para preparar nuevos significados útiles a futuro. Es nuestro caso en el colegio Bayard, donde los alumnos trabajan con circuitos desde 2° grado y en 1° año aplican sensores de 2 estados que son básicamente interruptores como los «reed switch».
Materiales necesarios: Cables, fuente de tensión (pilas, baterías, interruptores (de tecla, de botón, reed switch), focos de luz aptos para la tensión de la fuente, herramientas. En el adjunto se ejemplifican diferentes tipos de circuitos previamente impresos en papel. Luego se los pega sobre cartón o foam board y los alumnos deben construir los circuitos siguiendo el gráfico. Probar las consecuencias de abrir y cerrar los interruptores. Ejemplos: CIRCUITOS IMPRESOS
2 – Programación.
La programación del código Morse es un camino (no el único) para que el conocimiento se transforme en acción. El objetivo de programación es entonces «automatizar» la emisión del alfabeto en código MORSE. Este trabajo se realizó con alumnos de 7° grado con experiencia en programación LOGO. La emisión se realizó por 3 caminos:
1 – Visual. El receptor MORSE fue reemplazado por un fuente de luz. En nuestro caso utilizamos leds.
2 – Gráfica. El receptor MORSE fue reemplazado por rayas y puntos graficados por la tortuga en la pantalla gráfica.
3 – Sonora. Muy importante, pues el sonido es omni direccional. Se utilizó el comando TONO que tiene 2 parámetros TONO frecuencia duración.
En los 3 casos se siguió la relación Duración Raya = 3 x Duración Punto.
Para aquellos no familiarizados con el lenguage de robótica, SALIDA 1 activa el puerto de conexión de salida de tensión N° 1 de la interfaz (donde sed conecta el led). Nuestra interfaz tiene 4 salidas entre 0 y 12 volts. La interfaz además de conectar el led con el procesador, sirve de fuente de tensión eléctrica. El comando E (encender) cierra el circuito de la salida activada y A (apagar) lo abre. E y A son como interruptores que abren y cierran el circuito interno dando o cortando la corriente. Finalmente DIR.A es el nombre de 1 de las 2 direcciones posibles de la corriente. Los LEDS son uni direccionales, si la corriente circula en un sentido se encienden, y en el sentido contrario no se encienden. A priori no es sencillo deducir si el led se encenderá con DIR.A o DIR.B. Esto se ha chequeado previamente a la programación.
Crear un procedimiento es crear una palabra con una acción asociada. En este caso elegimos «nombres transparentes», es decir que el nombre comunica la función. En este contexto elegimos PUNTO y RAYA. Podríamos haber elegido PUN y RAY o TRANSMITIR_PUNTO Y TRANSMITIR_RAYA. Cuanto más transparente queramos el nombre, más largo deberá ser. Usualmente conviene elegir una posición intermedia como en este caso.
PARA PUNTO SALIDA 1 DIR.A E TONO 600 80
PONGROSOR 3 BL AV 3; avance del punto SL ESPERA 10; tiempo de encendido led A
AV 6
ESPERA 2
fin
PARA RAYA SALIDA 1 DIR.A E TONO 600 240
PONGROSOR 3 BL AV 9; avance dela raya SL ESPERA 30, tiempo de encendido led A
AV 6
ESPERA 2
fin
Referencias en color
Color ROJO: Activación de leds en SALIDA 1.
Color verde: Graficación de punto y raya en la pantalla por medio de la tortuga.
Color violeta: Emisión sonora.
PARADIGMA MODULAR
LOGO fue creado bajo el signo del paradigma de programación modular, un subconjunto del paradigma de programación estructurada. Para entender este paradigma deberíamos conocer el anterior, que puede llamarse «paradigma tallarín», debido a los entrecruzamientos de la secuencia de comandos. La modularidad en el caso de LOGO respondía a un interés educativo, crear un lenguaje que permitiese la aplicación de heurísticas (método general de resolución de problemas) como la división de problemas complejos en problemas simples hasta el punto que el procedimiento dejaba de ser un problema para ser algo de solución reconocible.
La modularidad del LOGO sigue siendo virtuosa en la medida que un procedimiento puede utilizarse cuantas veces uno quiera anidado dentro de otros procedimientos más complejos, como los módulos de un mueble permiten crear diferentes estructuras. Es una tecnología de sotware similar a las actuales DLL.
En el caso que nos ocupa los procedimientos PUNTO y RAYA son los procedimientos mínimos, los módulos más simples que pueden utilizarse para resolver todos los procedimientos que emiten el código MORSE de cada letra del alfabeto. Por ejemplo:
para _A
PUNTO RAYA
espera 12 av 10
BAJAR?
Fin
para _S
PUNTO PUNTO PUNTO
espera 12 av 10
BAJAR?
fin
para _O
RAYA RAYA RAYA
espera 12 av 10
BAJAR?
fin
El guión bajo que precede a la letra (_A _S _O) sirve para evitar conflictos con comandos previos que tiene el nombre de una letra. Por ejemplo la conjunción Y, la disyunción O y los mismos comandos de robótica E, A, I. Es poco probable que haya un comando que empiece con el _.
Una vez programadas todas las letras, se programan con ellas las palabras a transmitir. Esta es una resolución por «extensión» o «enumeración», ya que debe resolverse cada palabra de un mensaje determinado. Por ejemplo SOS:
PARA SOS
_S _O _S
FIN
La emisión de la frase citada: «Un saludo cordial a todos los pueblos que se hacen, por el intermedio del cable, una familia sola y un barrio», demanda la creación de 1 procedimiento para cada palabra y el procedimiento superior que contenga todas ellas (En este caso llamado MENSAJE_SARMIENTO).
PARA UN
_U
_N
AV 12
FIN
PARA SALUDO
_S
_A
_L
_U
_D
_O
AV 12
FIN
PARA MENSAJE_SARMIENTO
UN SEPPAL
SALUDO SEPPAL
CORDIAL SEPPAL
_A SEPPAL
TODOS SEPPAL
LOS SEPPAL
PUEBLOS SEPPAL
QUE SEPPAL
SE_ SEPPAL
HACEN SEPPAL
POR SEPPAL
EL SEPPAL
INTERMEDIO SEPPAL
DEL SEPPAL
CABLE SEPPAL
UNA SEPPAL
FAMILIA SEPPAL
SOLA SEPPAL
_Y SEPPAL
UN SEPPAL
BARRIO SEPPAL
FIN
PARA SEPPAL; espacio separador de palabras
SL AV 30 BL
ESPERA 30
FIN
INTERVENCIÓN – PROGRAMACIÓN SUPERIOR
Una intervención es una ampliación de los procedimientos realizados por los alumnos o una superación funcional. En ambos casos se necesita un nivel de programación y/o abstracción superior al de los alumnos o a menudo un tiempo adicional de dedicación que no se dispone.
Una intervención fue aplicada a los procedimientos ya expuestos con el objeto de que la tortuga rotulase debajo del código Braille la letra codificada.
En cada procedimiento se almacena en una memoria de nombre «posini la posición de la tortuga al inicia la gráfica del código.
para _A make “posini pos
PUNTO RAYA rotularletra “A
espera 12 av 10
BAJAR?
Fin
La misma modificación debería introducirse en todos los procedimientos que emiten cada letra.
para _O make “posini pos
RAYA RAYA RAYA rotularletra “O
espera 12 av 10
BAJAR?
Fin
Finalmente el procedimiento ROTULARLETRA, rotula el caracter :car debajo del código.
PARA ROTULARLETRA :car
Make “posfin pos
Make “distancia (primero :posfin) – primero :posini
Sl Ponpos :posini
Ponrumbo 90
Gd 90 av 30 gi 90
AV :distancia / 4 ROTULA :car
Ponpos :posfin
Fin
PALABRA_MORSE Y FRASE_MORSE
Esta intervención es más compleja y necesita de un nivel de abstracción más elevado. No fue aplicada al proyecto, pero es expuesta aquí como un ejemplo de como la complejidad del lenguaje es una función del desarrollo del pensamiento. El objetivo es crear un traductor que pueda codificar cualquier frase al MORSE. Necesitamos 2 procedimientos:
PARA PALABRA_MORSE [palabra a codificar]
Este procedimiento codifica la palabra que se ingresa como input.
PARA FRASE_MORSE[frase a codificar]
Este procedimiento recibe como input cualquier frase y la codifica al código Morse. Anida al procedimiento PALABRA_MORSE
Para resolver estos problemas utilizamos el comando EJECUTA [listado de procedimientos]. En inglés es el comando RUN.
EJECUTA tiene un input que es la lista de procedimientos a ejecutar. En un caso simple escribiríamos EJECUTA [ _A ] para emitir el código e la letra A. Cada letra tiene un procedimiento asociado cuyo nombre es _letra.
El comando PALABRA permite general el nombre del procedimiento para cada letra: PALABRA «_ (letra) = _letra.
El comando FRASE forma una lista con sus inputs: FRASE [] PALABRA «_ «Z = [ _Z ]
Es el tipo de resultado que admite el comando EJECUTA
PARA PALABRA_MORSE :pal
SI VACIO? :pal [SEPPAL alto]; cuando el input se vacía de letras ejecuta la separación y se detiene
EJECUTA FRASE [] palabra «_ primero :pal; ejecuta el código de la primer letra
PALABRA_MORSE mp :pal; recursión, repite el proceso pero quitando la primer letra al input
FIN
PARA FRASE_MOSE :frase
SI VACIO? :frase [alto]; cuando el input se vacía se detiene
PALABRA_MORSE primero :frase; ejecuta la primer palabra del input
FRASE_MORSE mp :frase ; recursión, repite el proceso pero quitando la primer palabra al input
FIN
PARA MORSE :FRASE
BP
SL PONPOS [-440 300] BL
PONRUMBO 90
FRASE_MORSE :FRASE
FIN
MORSE [EN EL PRINCIPIO ERA EL LOGOS Y VIAJABA POR LOS CABLES Y LA FIBRA Y EL LOGOS DIJO MENS ET MANUS Y PAPERT VIO QUE ERA BUENO]
PUNTO Y COMA FINAL
Como insistiría con vehemencia Sarmiento, los puntos y las comas son indispensables para el lenguaje. Así que nos queda como tarea agregar su programación al código MORSE.
MENS ET MANUS II
Como dijimos durante la presidencia de Sarmiento se tendieron más de 6000 km de cable telegráfico, se crearon escuelas para operadores y la Adminsitración Nacional de Telecomunicaciones. Básicamente las líneas tendidas tendieron a unir 3 regiones del país:
1 Línea del Litoral (Buenos Aires – Corrientes)
2 Línea del Norte (Buenos Aires – Salta)
3 Línea del Oeste (Buenos Aires – Cuyo) y Santiago de Chile.
Cada línea unía ciudades nodales y pueblos intermedios y aledaños. ¿Cómo pasar de los semántico a lo episódico? Es lo que muestra este video. Los detalles constructivos pueden deducirse o pueden escribirme en el blog.
PARA LINEA_LITORAL SALIDA 2 DIR.A E
Es [La línea del Litoral, comunicaba Bs. As. con Rosario y Corrientes – y fue inaugurada en 1870]
Es [1 – Buenos Aires – Rosario – 1869]
Es [2 – Rosario – Paraná]
Es [3 – Paraná con Corrientes – 1870]
Fin
En cada ciudad nodal fue emplazado un tira de 3 leds (12 V). La lína del Litoral utiliza entonces 4 tiras (4 ciudades) que deben encenderse simultáneamente al encender la SALIDA 2 de la interfaz (podría ser cualquiera de las 4 salidas). Para ello es necesario conectar en paralelo las 4 tiras de leds a la salida 2. Recordemos que las salidas de tensión son bipolares (+ -). El positivo de la salida 2 se conecta a un alambre (en rojo) que se fija al mapa pasando por las 4 ciudades. Lo mismo se hace con el negativo (en negro). Ambos alambres son una extensión de los polos + – de la salida, por lo tanto cuando la salida se «encienda» (E) habrá 12 volts entre ambos alambres. ES IMPRESCINDIBLE QUE LOS ALAMBRES (ROJO Y NEGRO) NO SE TOQUEN. Finalmente cada tira de LEDS tiene 2 cables, uno se conecta al ROJO (+) y el otro al NEGRO (-)
Los alambres (en el dibujo representados en rojo y negro para difenciarlos) son los equivalentes al cable telegráfico por donde circulan los pulso cortos y largos. Pueden extenderse por arriba del mapa como sucede con los postes de telégrafo o por debajo. Esta segunda forma es la que utilizamos, por lo que los cables de transmisión en realidad no se ven en el video. Lo mismo hay que hacer para las otras líneas.
COLEGIO BAYARD – LOS CAMINOS DE LA PALABRA
MENS ET MANUS – LOGOS
En este artículo he tratado de comunicar de qué manera los principios (LOGOS) nos ayudan a tomar decisiones sobre qué hacer con la tecnología en la escuela. El LOGO es el resultado de ese principio. Como LOGOS es una forma de razonar, aparentemente se trata de valores, pero en realidad es eficiencia aplicada al aprendizaje. La tecnología aplicada a la educación no es homogénea. Representa modalidades diferentes y a menudo opuestas. La tecnología valiosa es aquella que nos permite que el conocimiento se expanda en acción, más aun la pedagogía valiosa es la que busca en forma sistemática que esto suceda, porque de esa manera el aprendizaje es más fuerte. Otras tecnologías son sustitutivas, sustituyen la acción, en lugar de expandirla. Está claro que los principios que Seymour transmitió y enfatizó son los mismos que emanan del ideario donde trabajó: MENS ET MANUS. Es notable cómo sólo 3 palabras puedan explicar tanto.
OUTCASTS: LOGO, LA QUÍMICA DEL CARBONO Y LA GEOMETRÍA DEL ESPACIO
Un reciente artículo enviado al grupo LOGO se interrogaba con el destino del Scratch, un entorno de programación desarrollado en el MIT, con una filosofía aparentemene similar al desterrado Logo. Para el artículo se daba la paradoja de que Scratch parecía seguir el mismo camino del Logo en el sistema educativo: El destierro (outcast).
No me preocupa el destino del Scratch, un software al que considero muy inferior a cualquier versión de Logo. En todo caso su futuro estará ligado a la valoración que hace la escuela de la programación, la construcción, y la resolución de problemas. Lo que sí me preocupa y desorienta es que en el plan de la denominada NES (Nueva Escuela Secundaria) del gobierno de la Ciudad de Buenos Aires, a la lista de desterrados del SE, se agrega nada menos que la denominada Química Orgánica, la química del carbono y de la vida. Efectivamente, en los contenidos básicos del llamado Ciclo Superior Orientado(3° , 4° y 5° años) , la química Orgánica que era la base de la química de 5° año, ha sido reducida a 1 unidad de las 6 / 7 unidades que componen la planificación de Química de 5° año (única etapa contemplada en el nuevo plan). Y si bien es verdad que el ciclo contiene una determinada cantidad de horas donde las escuelas pueden reforzar áreas de acuerdo a la orientación elegida, las orientaciones definidas posibles son:
Comunicación
Economía y Administración
Educación Física
Ciencias Naturales
Ciencias Sociales
Informática
Arte
Agraria / Agro Ambiente
Turismo
Lenguas
De manera que quizás en Ciencias Naturales o Agro Ambiente podrían incluirse contenidos relacionados, aunque si la materia en sí está en 5° año y minimizada no cabe esperar demasiadas posibilidades de expandirla. De hecho la misma NES reconoce el poco interés que tienen los contenidos de la química del carbono, cuando sostiene: «No se pretende un estudio detallado de los compuestos del carbono, sino el reconocimiento (1) de su existencia e importancia. Se sugiere tratar los contenidos relativos a los compuestos del carbono junto con otros contenidos de este y de los demás bloques afines. Así se procura facilitar la construcción de una visión integrada de la química. Por ejemplo, a continuación de uniones químicas, tratar modelos del átomo de carbono, sus enlaces y las estructuras de algunos hidrocarburos».
Sin duda es una evaluación realista porque con el espacio concedido mucho más no puede realizarse pero no deja de sorprender que se minimice de esta forma a la química de la vida. Con todo debo reconocer que ya en mis tiempos de estudiante, mis conocimientos de química desarrollados en la escuela secundaria fueron pobres y lo que sé lo adquirí en mi etapa universitaria y docente.
Finalmente el 3° «descastado» (Outcasted) de la vida escolar, lleva varios años de destierro, infra valoración y reducción: La geometría y en particular la Geometría del espacio, al extremo que por experiencia sé que para un alumno de 2° año, la resolución de la superficie de un triángulo es un enigma irresoluble.
GEOMETRÍA DEL CARBONO Y SUS ENLACES
Este tema empecé a pensarlo como un proyecto de diseño 3D. Me parece poderoso poder diseñar y luego imprimir los componentes de una molécula, especialmente las orgánicas que forman largas cadenas con una geometría definida. Se da también el interesante efecto de los isómeros, compuestos de igual fórmula molecular, pero diferentes propiedades consecuencia de una diferente distribución de sus átomos o de sus uniones. Por ejemplo la celulosa y la sacarosa son polímeros de la glucosa que difieren en el tipo de unión (alfa y beta). La saliva contiene «ptialina» un catalizador para crackear la unión alfa de la sacarosa, pero lamentablemente no poseemos el catalizador de la unión beta, si así fuese podríamos alimentarnos con una buena ensalada de pasto.
HIDROCARBUROS: CARBONO ENCADENADO
Los HC son los primeros compuestos orgánicos que se estudian dado su simplicidad y su importancia. Todos los derivados del petróleo, incluyendo los combustibles como la nafta, el gasoil, el gas natural, el gas envasado, son HC, que son básicamente cadenas de átomos de carbono enlazados a átomos de hidrógeno.
El carbono es el elemento 6 de la Tabla Periódica, es decir tiene n° atómico 6, es decir su núcleo posee 6 protones y el átomo neutro 6 electrones, distribuidos en 2 niveles: 2 4.
Además en el núcleo encontramos otra partícula: el neutrón, que tiene una masa aproximadamente igual al protón pero carente de carga eléctrica. Puede encontrarse núcleos de carbono con diferente cantidad de neutrones. A ésto llamamos ISÓTOPOS. El isótopo más numeroso del C (98,89%) tiene 6 neutrones y por lo tanto su Número Másico es = 6p + 6 n = 12.
Pero también hay núcleos de C con 8 protones, y su Número Másico es = 6p + 8 n = 14. Es el C14 que se utiliza para determinar la antiguedad de objetos o restos que contienen Carbono. La presencia de este isótopo es la causa de que el Peso atómico promedio sea levemente superior a 12 (12,0107)
Los 4 electrones libres del 2° nivel explican la gran capacidad reactiva que tiene este elemento, esa capacidad se cuantifica con el n° de enlaces que puede formar, que son 4, 1 por cada electrón. Se dice que el carbono tiene valencia 4.
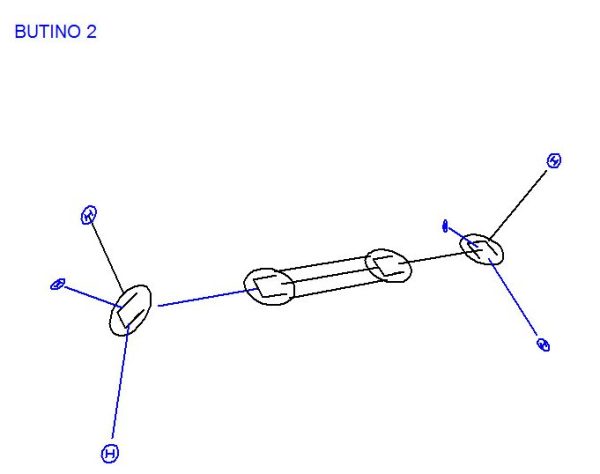
En la figura vemos fórmulas desarrolladas de un tipo de HC denominados alcanos o HC saturados, donde cada C forma 4 enlaces y los enlaces C – C son enlaces simples. Como todos los HC estos alcanos son lineales (propano, butano) o ramificados (isobutano, isopentano) y abiertos. También hay HC cíclicos (Ciclo pentano).
Estas fórmulas son esquemas simplificados planos denominados «fórmulas desarrolladas».
La geometría de las cadenas que determinan en parte sus propiedades se entiende a partir de la dirección 3d de los enlaces. El Carbono saturado tienen sus 4 enlaces dirigidos hacia los vértices de un tetraedro regular.
GEOMETRÍA DEL CARBONO TETRAÉDRICO
En el tetraedro regular las 3 caras son triángulos equiláteros congruentes. Los ángulos formados por las aristas son de aproximadamente 109°. Si una de las caras está apoyada en el plano horizontal, la línea perpendicular a la base que pasa por el vértice superior pasa por el punto medio de la base. Este se obtiene trazando las mediatrices de cada lado. VIDEO TRAZADO MEDIATRICES.
TETRAEDROPROYECCION
La figura graficada en FMS LOGO muestra la proyección del tetraedo sobre el plano horizontal. La cara A´B´C´ apoya sobre el plano y tiene las medidas de la cara del tetraedro. Las otras caras son: A´O´C´, C´O´B´y A´O´B´.
O´es la proyección del vértice superior.
Las aristas proyectadas son A´O´, C´O´Y B´O´.
Estas aristas proyectadas forman ángulos de 120°, ya que cada uno de ellos se opone al lado de la base (ángulo B´O´C´ se opone a C´B´, ángulo A´O´C´ se opone a A´C´ y ángulo C´O´B´ se opone a C´B´. Como los lados son congruentes también los son los ángulos entre sí y por lo tanto su medida es 260/3 = 120°,
El procedimiento TETRAPROYE, grafica la figura.
PARA TETRAPROYE :LADO
BP GD 90
PONCL 5
PONGROSOR 3 BL REPITE 3 [AV :LADO GI 120]; grafica el triángulo base A´B´C´
MAKE «PO tan 30*:LADO/2; en el triángulo rectángulo P´O´B´, el ángulo B´ de 60° queda dividido en 2 por la mediatriz que es también bisectriz. B´/2 = 30° y la TAN 30 = P´O´/lado/2 y PO
MAKE «ARISTA :LADO/2/SEN 60;las aristas O´C´=O´A´= O´B´son las hipotenusas de los triángulos O´C´Q´, etc
MAKE «MEDIATRIZ POTENCIA (POTENCIA :LADO 2) – (POTENCIA :LADO/2 2) 1/2; calcula la longitud de las mediatrices P´C´= R´B´= A´Q´. En el triángulo rectángulo A´C´P´ la mediatriz es el cateto mayor, A´P´ el cateto menor (la mitad del lado) y A´C¨la hipotenusa
pongrosor 1
poncl 0
repite 3 [av :lado / 2 gi 90 av :mediatriz re :mediatriz gd 90 av :lado / 2 gi 120]
pongrosor 2
poncl 3
repite 3 [bl gi 30 av :arista re :arista gd 30 sl av :lado gi 120]
fin
GRAFICA DEL CARBONO TETRAÉDRICO EN 3D
PARA GRAFMETANO3D
bl CATO
SL AV 20 BL AV 80 HATO MAKE «posh1 POSXYZ
SL re 100 downpitch 109
SL AV 10 BL av 80 SL AV 10 HATO MAKE «posh2 POSXYZ
SL re 100 UPPITCH 19 gi 120 DOWNPITCH 19
SL AV 10 BL av 80 SL AV 10 HATO MAKE «posh3 POSXYZ
SL re 100 UPPITCH 19 gi 120 DOWNPITCH 19
SL AV 10 BL av 80 SL AV 10 HATO MAKE «posh4 POSXYZ
SL re 100 UPPITCH 19 gi 120 DOWNPITCH 19
UPPITCH 109
FIN
CATO grafica un esquema plano del átomo de carbono.
HATO grafica un esquema plano del átomo de hidrógeno.
MAKE «poshn posxyz guarda la posición 3d de cada átomo de hidrógeno.
UPPITCH 19 coloca a la tortuga en el plano horizontal y en ese plano gira 120° para graficar la siguiente arista DOWNPITCH 19
El pase de diapositivas requiere JavaScript.
METANO DANCE
ALCANOS, ALQUENOS Y ALQUINOS
Los HC se clasifican en 3 grupos según el tipo de enlace C – C que posean en su cadena. Los alcanos están constituidos por cadenas de carbonos tetraédricos, cada valencia del C está enlazada a un átomo o grupo de átomos diferente, por esa razón se los llama HC saturados. Los enlaces C – C saturados pueder girar alrededor de sus enlaces. El alcano más simple es el metano, cuya fórmula molecular es CH4. La fórmula molecular de los alcanos es una función del n° de carbonos: CnH2n+2.
Los alquenos poseen al menos un enlace C-C con 2 ligaduras, ambos carbonos tiene sus valencias no saturadas, pues potencialmente tienen 1 valencia disponible. Los C así enlazados no pueden girar alrededor del enlace y están contenidos en un mismo plano.
El alqueno más simple es el etileno o eteno (C2H4), uno de los compuestos orgánicos más utilizados. Entre otras funciones es el componente del polietileno. La fórmula molecular de los alquenos es una función del n° de carbonos: CnH2n.
El pase de diapositivas requiere JavaScript.
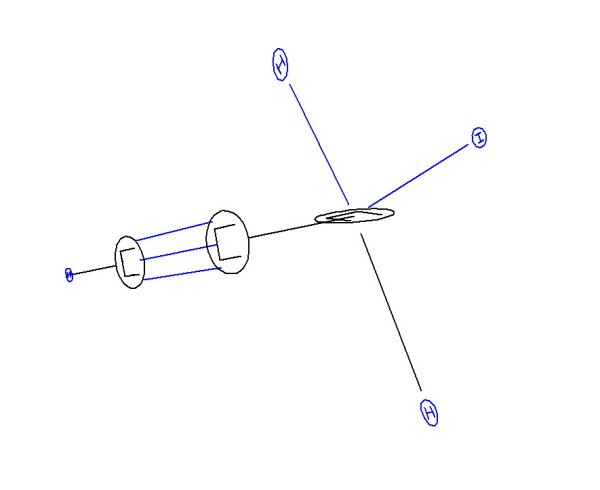
Finalmente los llamados alquinos. tienen un enlace C-C triple. El alquino más simple es el ETINO (acetileno) cuya fórmula molecular es C2H2. La fórmula molecular de los alquinos es CnHn.
AEI_GEOMETRÍA
NOMECLATURA
Los HC pueden tener cadenas abiertas o cíclicas, lineales o ramificadas. El nombre tiene 2 componentes: la terminación indica si es un HC saturado ANO o no saturado (ENO o INO) y la raíz el n° de carbonos.
N° C
Alcanos
Alquenos
Alquinos
1
Metano – CH4
2
Etano – C2H6
Eteno – C2H4
Etino – C2H2
3
Propano – C3H8
Propeno – C3H6
Propino – C3H4
4
Butano – C4H10
Buteno – C4H8
Butino – C4H6
5
Pentano – C5H12
Penteno – C5H10
Pentino – C5H8
6
Hexano – C6H14
Hexeno – C6H12
Hexino – C6H10
7
Eptano – C7H16
Epteno – C7H14
Eptino – C7H12
8
Octano – C8H18
Octeno – C8H16
Octino – C8H14
9
Nonano – C9H20
Noneno – C9H18
Nonino – C9H16
10
Decano – C10H22
Deceno – C10H20
Decino – C10H18
N
CnH2n+2
CnHn
CnH2n-2
ISÓMEROS
Son compuestos que tienen la misma fórmula molecular pero difieren en la estructura o la posición de un grupo funcional o enlace no saturado. Los isómeros tienen diferentes propiedades físicas y químicas. Por ejemplo el Butano cuya fórmula molecular es C4H10 tiene 2 isómeros, uno llamado N Butano tiene una cadena lineal y el otro llamado Iso Butano o metil Propano tiene una cadena ramificada. Ambos son gases incoloros, pero el punto de fusión del N Butano es -138 °C y el de ebullición 0 °C. Para el Iso Butano esos valores son -160 °C y -12°C.
Isómeros estructurales como el ISO BUTANO son posibles a partir de una cadena de 4 carbonos. El pentano tiene 3 isómeros: N Pentano, Iso Pentano y Neo Pentano
El exano tiene 5 isómeros. La siguiente tabla demuestra que partiendo del butano el nó de isómeros estructurales de un alcano de N carbonos es la sumatoria de los isómeros de los 3 alcanos inmediatamente inferiores.
N° C
N° isómeros estructurales
1
1
2
1
3
1
4
2
5
3
6
5
7
8
8
13
9
21
10
34
11
55
Como puede observarse se trata de una progresión donde a partir del C4 la cantidad de isómeros ISOn de la cadena Cn, es la suma de ISOn-1 + ISOn-2. ISOn = ISOn-1 + ISOn-2, por ejemplo para n = 7: (ISO7 = 8) = (ISO6=5) + (ISO5=3)
Los siguientes procedimientos permite calcular el n°de isómeros estructurales en función del n° de carbonos de un alcano
PARA NUMISOMEROS :NC
si no ENTERO? :NC [ES [Entrada inválida] alto]
si :NC < 1 [Es [Entrada inválida] alto]
make «s1 0
make «s2 1
make «isoestructural SERIEISO :S1 :S2 :NC
(es [Isómeros estructurales=] :isoestructural)
FIN
PARA SERIEISO :a1 :a2 :nc; procedimiento recursivo
si :nc = 1 [dev 1]; es ek caso del metano
si :nc = 2 [dev :a2]; cuando el n° C llega a 2 devuelve la sumatoria final
dev SERIEISO :a2 :a1 + :a2 :nc – 1; :a2 pasa a valer :a1+:a2 y :nc se reduce en 1
fin
Cuando un procedimiento recursivo devuelte un valor simultáneamente se detiene
PARA ENTERO? :X; devuelve ciesto si el input es un valor entero
SI NO NUMERO? :X [ES [El Input debe ser un número] ALTO]
DEV :X = ENTERO :X
FIN
Si ingresamos NUMISOMEROS 5
SERIEISO 0 1 5
SERIEISO 1 0+1 5-1
SERIEISO 1 1 4
SERIEISO 1 1+1 4-1
SERIEISO 1 2 3
SERIEISO 2 2+1 3-1
SERIEISO 2 3 2
como :NC = 2 Dev :a2 = 3
Para Nc= 12
>NUMISOMEROS 12 Isómeros estructurales= 89
LECTOR DE NOMENCLATURA
Nos proponemos hacer un procedimiento que lea la nomenclatura de un Hidrocarburo Saturado (por ejemplo BUTANO) e informe la cantidad de carbonos, la fórmula molecular, la semidesarrollada, la cantidad de isómeros (estructurales o posicionales). Para realizarlo necesitamos 2 procedimientos auxiliares que son funciones contenidas en EXCEL y ACCES: Derecha e Izquierda
PARA DERECHA :T :N;extraerá de la palabra :T :N caracteres desde la derecha.
si (cuenta :t) < :n [(es [El 1° input tiene menos elementos que] :n) alto]
si :n = 0 [dev «]
dev palabra DERECHA mu :t :n – 1 ultimo :t
FIN
>DERECHA «BUTANO 3
palabra DERECHA «BUTAN 2 «O
palabra DERECHA «BUTA 1 «NO
palabra DERECHA «BUT 0 «ANO
:n = 0 DEV palabra » «ANO
No dices qué debo hacer con ANO
PARA IZQUIERDA :t :n ;extraerá de la palabra :T :N caracteres desde la izquierda.
si (cuenta :t) < :n [(es [El 1° input tiene menos elementos que] :n) alto]
si :n = 0 [dev «]
dev palabra primero :t izquierda mp :t :n – 1
fin
>IZQUIERDA «PENTANO (CUENTA «PENTANO) – 3 No dices qué debo hacer con PENT
PARA NUMCAR :HC
make «fininput DERECHA :HC 3
make «raizinput IZQUIERDA :HC (cuenta :HC) – 3
si :raizinput = «met [dev 1]
si :raizinput = «et [dev 2]
si :raizinput = «prop [dev 3]
si :raizinput = «but [dev 4]
si :raizinput = «pent [dev 5]
si o :raizinput = «ex :raizinput = «hex [dev 6]
si o :raizinput = «ept :raizinput = «hept [dev 7]
si :raizinput = «oct [dev 8]
si :raizinput = «non [dev 9]
si :raizinput = «dec [dev 10]
si :raizinput = «undec [dev 11]
si :raizinput = «dodec [dev 12]
FIN
>NUMCAR «EPTANO No dices qué debo hacer con 7
PARA FORMULAMOL :ALCANO
MAKE «NUMC NUMCAR :ALCANO
MAKE «NUMH :NUMC * 2 + 2
MAKE «PESOMOL :NUMC*12+:NUMH*1
si :numc = 1 [Es [Fórmula molecular= CH4] (es [PESO MOLECULAR=] :PESOMOL) ALTO]
(ES [Fórmula molecular=] (PALABRA «C :NUMC «H :NUMH))
(ES [PESO MOLECULAR=] :PESOMOL)
TYPE [Fórmula semidesarrollada:] TYPE «CH3 TYPE «- REPITE :NUMC – 2 [TYPE «CH2-] ES «CH3
Finalmente para los alcanos agreguemos el procedimiento ALCANO que grafica también la fórmula desarrollada plana del N Alcano.
PARA ALCANO :alcano
MAKE «NUMC NUMCAR :ALCANO
si :numc = 1 [bp Grafmetano2d formulamol :alcano alto]
bp gi 90 av :numc*60 gd 90; desplaza la tortuga hacia el fondo
grafmetilo2d; el metilo es el grupo -CH3
repite :numc – 2 [grafmetileno2d]; el metileno es el grupo -CH2-
grafmetilo2dfin
FORMULAMOL :alcano
Es el caso en que los isómeros provienen de la diferente posición de un grupo funcional, por ejempo el -OH característico de los alcoholes o una doble o triple ligadura. En el caso de los alquenos hay 1 solo PROPENO ya que la cadena CH2=CH-CH3 es la misma que CH3-CH=CH2 como puede visualizarse haciendo rolar la molécula sobre el eje vertical:
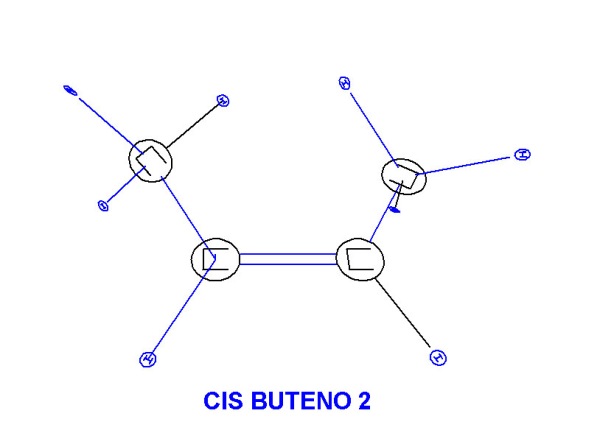
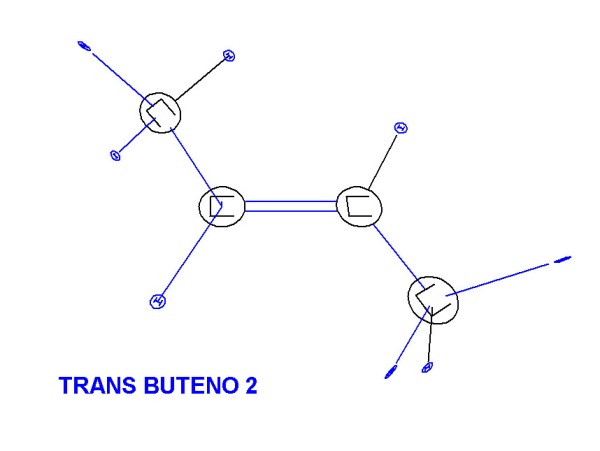
En cambio el BUTENO tiene 2 isómeros posicionales:
BUTENO 1: CH2=CH-CH2-CH3 y BUTENO 2: CH3-CH=CH=CH3
El BUTENO 2 a su vez tiene 2 estereo isómeros el CIS y el TRANS productos de la imposibilidad de rotación del doble enlace.
En el CIS los 2 metilos (carbonos 1 y 4) están del mismo lado de la doble ligadura.
En el TRANS los 2 metilos (carbonos 1 y 4) están en lados contrarios de la doble ligadura.
PARA FORMULAMOL2 :ALQUENO
BT
MAKE «NUMC NUMCAR :ALQUENO
SI :NUMC > 12 [ES [NO TENEMOS INFO DE ESTE ALQUENO] ALTO]
MAKE «NUMH :NUMC * 2
MAKE «PESOMOL :NUMC*12+:NUMH*1
(ES [Fórmula molecular=] (PALABRA «C :NUMC «H :NUMH))
(ES [PESO MOLECULAR] :PESOMOL)
MAKE «NUMISOMEROS ENTERO :NUMC / 2
(ES [ISOMEROS POSICIONALES=] :NUMISOMEROS)
SI :NUMC = 2 [TYPE [Fórmula desarrollada:] TYPE CAR 32 TYPE «CH2= ES «CH2]
SI :NUMC = 3 [TYPE [Fórmula desarrollada:] TYPE CAR 32 TYPE «CH2= TYPE «CH- ES «CH3]
SI :NUMC = 4 [formulabutenos]
SI :NUMC = 5 [formulapentenos]
SI :NUMC = 6 [formulaexenos]
SI :NUMC = 7 [formulaeptenos]
SI :NUMC = 8 [formulaoctenos]
SI :NUMC = 9 [formulanonenos]
SI :NUMC = 10 [formulaDECEnos]
SI :NUMC = 11 [formulaUNDECEnos]
SI :NUMC = 12 [formulaDODECENOS]
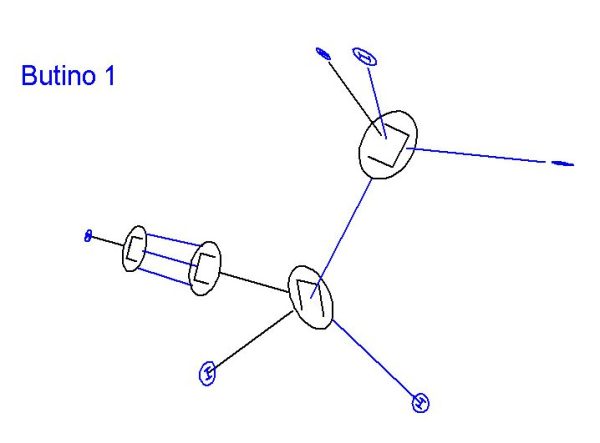
El PROPINO no tiene isómeros posicionales, éstos aparecer a partir de os BUTINOS, BUTINO 1 (CH#C-CH2-CH3) y BUTINO 2 (CH3-C#C-CH3)
PARA FORMULAMOL3 :ALQUiNO
BT
MAKE «NUMC NUMCAR :ALQUINO
MAKE «NUMH :NUMC * 2 – 2
SI :NUMC > 12 [ES [NO TENEMOS INFO DE ESTE ALQUINO] ALTO]
MAKE «PESOMOL :NUMC*12+:NUMH*1
(ES [Fórmula molecular=] (PALABRA «C :NUMC «H :NUMH))
(ES [PESO MOLECULAR] :PESOMOL)
MAKE «NUMISOMEROS ENTERO :NUMC / 2
(ES [ISOMEROS POSICIONALES=] :NUMISOMEROS)
SI :NUMC = 2 [TYPE [Fórmula semidesarrollada:] TYPE CAR 32 TYPE «CH# ES «CH]
SI :NUMC = 3 [TYPE [Fórmula semidesarrollada:] TYPE CAR 32 TYPE «CH# TYPE «C- ES «CH3]
SI :NUMC = 4 [formulabutInos]
SI :NUMC = 5 [formulapentinos]
SI :NUMC = 6 [formulaexinos]
SI :NUMC = 7 [formulaeptinos]
SI :NUMC = 8 [formulaoctinos]
SI :NUMC = 9 [formulanoninos]
SI :NUMC = 10 [formulaDECinos]
SI :NUMC = 11 [formulaUNDECinos]
SI :NUMC = 12 [formulaDODECINOS]
FIN
Finalmente el procedimiento general es COMPUESTOHC que analiza el input y reconoce si es alcano, alqueno o alquino.
PARA COMPUESTOHC :HC
MAKE «FININPUT DERECHA :HC 3
SI :FININPUT = «ANO [ALCANO :HC ALTO]
SI :FININPUT = «ENO [ALQUENO :HC ALTO]
SI :FININPUT = «INO [ALQUINO :HC ALTO]
ES [NO RECONOZCO ESTE NOMBRE]
FIN
APROXIMACIÓN A LA GEOMETRÍA DE LAS MOLÉCULAS
He recorrido algunos aspectos de la geometría de las moléculas de los Hidrocarburos, que plantean problemas matemáticos de las relaciones entre los ángulos que forman los enlaces. Relaciones que determinan sus propiedades físicas y reactivas. Al mismo tiempo es un ejemplo de cómo su programación nos permite ampliar nuestra percepción de las moléculas en el espacio y sobre todo el movimiento relativo de los grupos funcionales dentro de la misma. En algún punto también nos permite experimentar un placer estético jugando con las formas y sus revoluciones.
Como decía Aristóteles, quizás el primer constructivista, «el hombre nada puede aprender sino en virtud de lo que sabe», por eso las herramientas digitales deben estar siempre detrás de nuestro conocimiento, nunca delante. La tortuga como alumno necesita del conocimiento del programador, es éste quien tracciona los acontecimientos, interpreta los errores y la percepción de formas y movimientos. Esta interacción entre el conocimiento propio y el accionar de la tortuga es el medio por el cual aprendemos y ampliamos nuestra cognición, al pensar en lo que hace la tortuga, pensamos sobre nuestro pensamiento, pues la tortuga acciona, movida por nuestras ideas. Es un espejo de nuestra mente, que incluye cognición y valores. Dime cómo usas la computadoara y te diré quién eres.
El INSTITUTO FÁTIMA ubicado en la zona de Beccar (San Isidro) es una institución privada dedicada a la educación de niños, jóvenes y adultos afectados de la visión y de la audición. Como enuncia su sitio, su objetivo es: «Brindar un ESPACIO EDUCATIVO TERAPÉUTICO para las personas con Sordoceguera, incluidas aquellas con limitaciones visuales / auditivas y necesidades adicionales, a fin de lograr su integración social». Su lema es «Sentir da sentido», la frase tiene sentido cuando conocemos que trabajan con personas que tienen disminuidas o ausentes funciones sensoriales tan importantes como la vista y el oído. Disminuciones que provocan otra serie de problemáticas cognitivas, motrices y posturales. El cerebro necesita información para desarrollarse, datos para procesar y aprender, seguridad para avanzar. Es el sentido de estimular los sentidos.
Mi contacto con Fátima se relaciona con la actividad solidaria que desarrolla el Colegio Bayard. Hace un par de años que a través del Área Social conformada por padres, directivos y docentes colabora entre otras instituciones con Fátima, principalmente mediante donaciones y visitación. Aunque el objetivo de involucrar a los alumnos en estas actividades estuvo siempre presente, en el año 2015 se intentó adoptar un modelo de APRENDIZAJE EN SERVICIO, que básicamente propone que los alumnos puedan crear objetos o acciones concretar útiles para las instituciones como Fátima a partir de los aprendizajes realizados en las aulas. Este proyecto global es llevado a cabo por la organización CLAYSS (Centro Latinoamericano de Aprendizaje y Servicio Solidario) y sus metas pueden leerse en su sitio http://www.clayss.org.ar
He expresado mis reparos al proyecto del Clayss en tanto pretende crear una pedagogía que opere alrededor del servicio a terceros, pues tengo un respeto acentuado por la lógica de las disciplinas. Clayss busca por un lado ayudar a instituciones solidarias y por otro renovar el significado del aprendizaje. Este objetivo creo que se puede lograr si se cumplen algunas condiciones.
PROYECTO DE ADMINISTRACIÓN
«Algunos de los avances más cruciales en el desarrollo mental se basan, no en la simple adquisición de nuevas destrezas, sino en la adquisición de nuevas formas administrativas de utilizar lo que ya uno sabe».
Seymour Papert – La Sociedad de la Mente de Marvin Minsky
Un proyecto de administración en el contexto de la frase de Papert, es un problema del cual se tienen los conocimientos (hoy se diría las competencias) necesarios para resolverlo, pero se necesita encontrar las mejores conexiones entre ellos para encontrar la mejor solución. Creo que este es uno de las condiciones que debe satisfacer un proyecto dentro del contexto Aprendizaje Solidario. Tener el conocimiento y sólo necesitar reordenarlo o completarlo. Pero aprender desde cero para resolver un proyecto es pedagógicamente desaconsejable, pues solo se aprendería lo necesario para ese problema específico.
Por otro lado el «hacer» fáctico es un objetivo de las escuelas técnicas. En Logo siempre hemos enfatizado el «hacer» cognitivo, es decir el construir como medio para el aprendizaje, pero «hacer» algo útil para otros necesita un grado de madurez y precisión no habituales en la escuela donde los proyectos se adaptan a la capacidad de los alumnos, no al revés.
Pero no quiero extenderme mucho más en este autodebate para no perder el hilo e ir directamente al proyecto que me tocó vivir y que fue una experiencia muy positiva casi diría teleológicamente positiva.
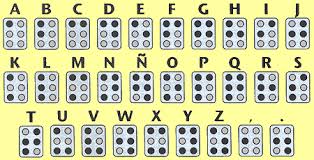
LOUIS BRAILLE
Seguramente hemos oído alguna vez acerca del sistema de escritura Braille. Fue creado por el francés Louis Braille (1809 – 1852), el 4° hijo de una familia rural dedicada principalmente a la talabartería. A los 3 años, un desafortunado accidente lo privó de la visión de su ojo izquierdo. La herida derivó en una infección que atacó el otro ojo. A los 5 años quedó totalmente ciego. Eso no le impidió tener una educación completa y llegó a ser profesor de ciegos. Se destacó en música, llegando a tocar con destreza el piano, el violoncello y el órgano.
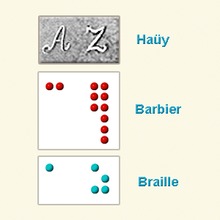
Según Wikipedia, Braille ideó su sistema de puntos en relieve en 1825, basándose en un sistema de las mismas características creado por un militar, Charles Barbier, quien había diseñado un lenguaje de puntos en relieve para que los militares pudiesen escribir y leer mensajes durante la noche en las campañas de guerra (Otra necesidad militar, como la proto Internet).
Valentin Haüy ya había tratado de solucionar este problema reproduciendo las letras en altorrelieve, no obstante eso suponía una lenta y complicada tarea.
Comparativa de como se representan las letras A y Z en los 3 códigos.
Antes de los 30 años, Louis Braille había ideado un sistema que se adecuaba perfectamente a las características de la percepción táctil a nivel psicológico, estructural y fisiológico. El signo braille, compuesto por un máximo de seis puntos, se adapta perfectamente a la yema del dedo y esto produce que la persona lo pueda aprender en su totalidad, transmitido como una imagen al cerebro.
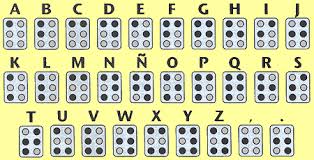
Este sistema consta de 63 caracteres formados de uno a seis puntos y que al ser impresos en relieve en papel permiten la lectura mediante el tacto. El original fue creado para el francés con sus consonantes y acentos especiales. Posteriormente su universalización obligó a realizar cambios para adaptarlo a cada lenguaje.
El Braille extendido incluye los números, caracteres especiales (¡?) y acentos.
Inicialmente el sistema encontró una fuerte oposición e incluso se llegó a prohibir durante muchos años. De hecho, fueron las personas ciegas las que defendieron e impulsaron el sistema, sin lugar a dudas los más indicados para decidir sobre esta cuestión. En 1853, un año después de la muerte de Braille, el sistema fue aceptado oficialmente por las Instituciones y por tanto su autor nunca llegó a ser reconocido oficialmente mientras vivía.
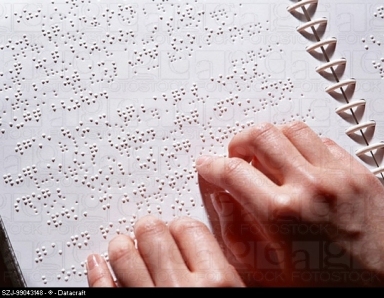
En la ciudad de Buenos Aires, frente al Museo Nacional de Bellas Artes encontramos esta escultura que es un homenaje a Louis Braille. Lo vemos con sus manos «leyendo» táctilmente un texto en su código reconocido internacionalmente.
LIBROS TÁCTILES Y GENERADORES BRAILLE
Mi relación con Fátima se canalizó principalmente con un grupo de chicos ciegos pero con algún tipo de audición (no totalmente sordos). La maestra, Valeria, me envió un listado de proyectos que eran de diferente grado de complejidad pero todos factibles como proyectos de administración. Los que tomamos fueron 3, así descriptos por Valeria:
Libros temáticos táctiles: Cada hoja tendrá dos dibujos táctiles (en relieve) con una diferencia entre ellos que los alumnos deberán detectar.
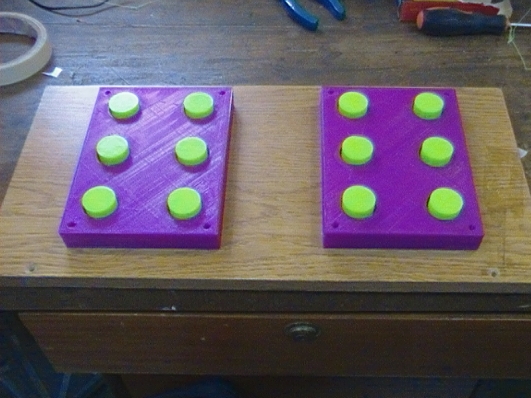
Generadores Braille: Dos signos generadores Braille montados sobre una base. Cada signo cuenta con 6 orificios en donde deben encastrar pequeños cilindros que al colocarlos quedarán en relieve. En el signo de la izquierda, la maestra formará un signo que deberá ser leído táctilmente por el alumno. Este deberá reproducirlo en el signo de la izquierda.
Generador Braille parlante: Un dispositivo generador de signo igual al punto anterior donde al armar la letra (combinación de puntos) se emita el fonema correspondiente.
Lectura Braille
EL GENERADOR BRAILLE
Los libros táctiles fueron realizados por alumnos de 1° año y es interesante analizar las dificultades que tuvimos que no fueron de índole técnico. Pero en este post me dedicaré al último de los proyectos mencionados ya que se relaciona con elementos de robótica (sensores) y programación. Este proyecto fue llevado a cabo por alumnos de 5° año. Al llegar a este curso los alumnos han tenido experiencias de aprendizaje y manipulación de diferentes sensores y de programación avanzada.
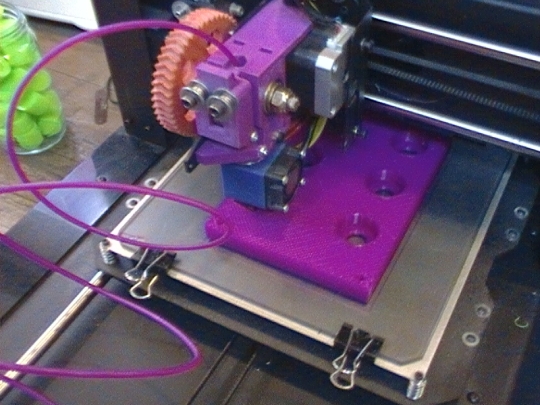
Los generadores y las piezas fueron diseñados primeramente en un programa de Diseño 3D y posteriormente fueron impresos en una impresoras 3D del colegio. Las medidas venían dadas por la docente de Fátima, aunque luego se llegó a una solución de compromiso por el tiempo que insume la impresión.
Impresora 3D en acción
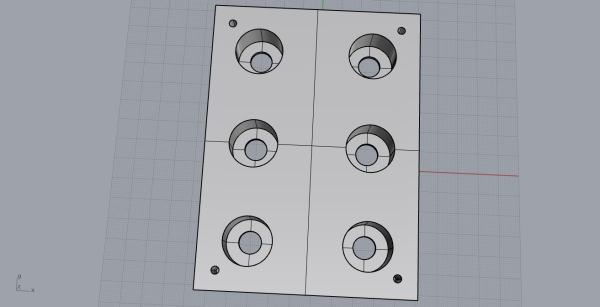
Diseño del generador en Rhinoceros
Diseño de las piezas en Rhinoceros
Generadores de signo terminados
GENERADOR BRAILLE PARLANTE
Este proyecto fue el más interesante porque implicaba la aplicación de elementos y programación propios de robótica, como sensores y programación de reglas y almacenamiento de datos en memoria. Los alumnos de 5° año habían estudiado diferentes tipos de sensores en 1°, 2° y 3° año. Estaban familiarizados con la programación de los mismos y la definición de memorias en lenguaje LOGO.
Elegí utilizar para este modelo, sensores del tipo Reed Switch, que son interruptores que se activan mediante un magneto. A diferencia del Generador del punto anterior, éste debería tener 2 partes ensamblables:
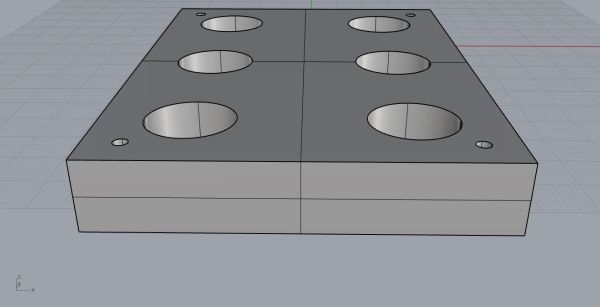
1 – Una tapa superior con agujeros para colocar las piezas cilíndricas. Cada pieza debería tener un imán de botón pegado en un extremo.
Vista superior
Vista de frente
Vista inferior
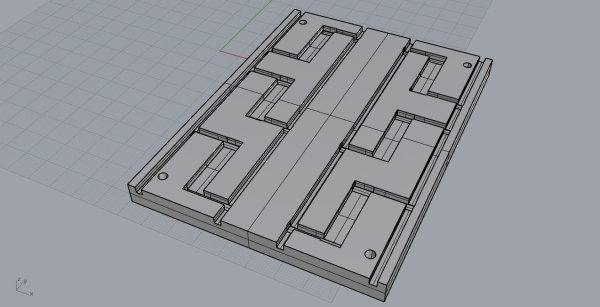
2 – Una base con cavidades para colocar los sensores y canales para pasar los cables.
Vista superior
Vista de frente
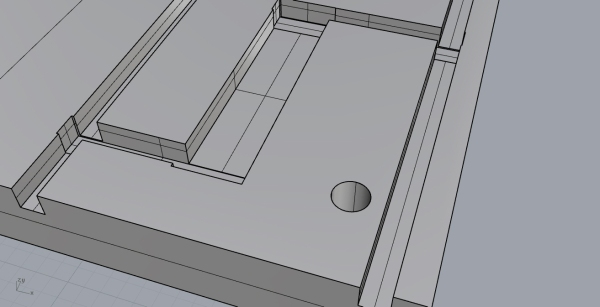
Detalle del portasensor
Ambas partes se unirían mediante tornillos, por lo que se incluyeron agujeros pasantes en ambas piezas exactamente coindidentes.
Los alumnos realizaron el diseño 3D de ambas partes, así como las piezas cilíndricas con una cavidad para colocar el imán de botón.
SENSORES REED SWITCH
Elegimos estos sensores por su sencillez y porque las otras opciones tenían otros problemas de montaje y funcionamiento que no sabíamos a priori como solucionar. Por ejemplo los sensores de luz podían ser sensibles a la sombra que proyecta una mano.
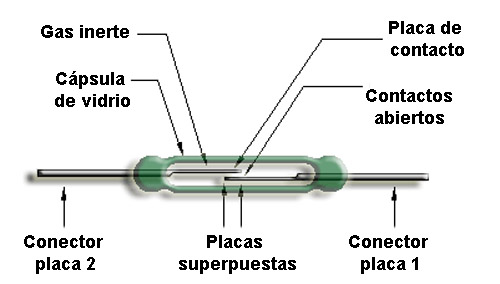
El esquema de la figura muestra que el REED es un interruptor con 2 placas superpuestas magnéticas. Mediante un imán se ejerce una fuerza que une ambas placas y cierra el circuito hasta que cesa la influencia del imán.
Esquema reed switch
Reed ya colocado, montado sobre una tira de meccano azul
A la izquierda podemos ver el REED montado sobre una tira de Meccano de 3 agujeros, también realizada con la impresora 3D. Se observan los cables de conexión negro y rojo (Izquierda y derecha) que se conectan a la interfaz. La cápsula de vidrio está cubierta con silicona que tiene un doble objetivo: Pegar el Reed a la tira y proteger la cápsula de vidrio que es muy frágil.
El montaje y soldadura de los sensores no fueron hechos por los alumnos sino por mí. Sabiendo de antemano las medidas de la base se soldó a cada Reed un cable lo suficientemente largo.
Fig 1
Fig. 2
Fig. 3
Fig. 4
Fig. 1 Tapa con agujeros centrados
Fig. 2 Base con sensores y cableado
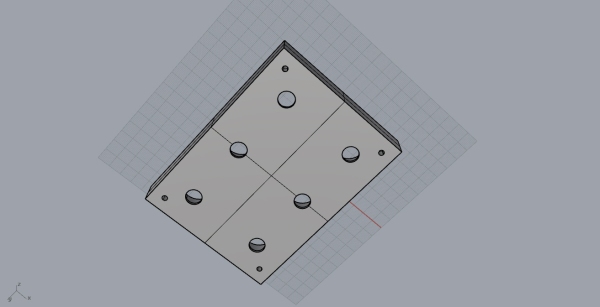
Fig. 3 Tapa con agujeros desplazados
Fig. 4 Dispositivo conectado a la interfaz
La tapa de la Fig. 1 fue diseñada para que el imán estuviese encima del centro geométrico del REED. Pero al probar el diseño resultó que el REED no se activaba al colocar el cilindro. Descubrimos que el punto de activación del REED está desplazado del centro. Por esta razón fue necesario diseñar e imprimir otra tapa con los agujeros desplazados (Fig. 3) para que el imán ubicado en el extremo del cilindro activase el REED correspondiente.
ENTRADAS Y SALIDAS, de BRAILLE A VOLTA
La interfaz es un nexo entre los dispositivos eléctricos exteriores y el procesador. La interfaz NEOTEC es un desarrollo realizado en el colegio Bayard y como puede verse en la figura tiene 4 salidas para «actuadores eléctricos» (motores por ejemplo) con una tensión que puede variar entre 1 y 12 volts.
Además tiene 6 entradas para sensores que se conectan mediante fichas «plug». Al enchufar el plug el sensor queda conectado en serie en un circuito de hasta 5 volts. Un sensor es un dispositivo que modifica la tensión del circuito en función de un estímulo externo (presión, calor, luz).
La interfaz se comunica con el procesador a través de un puerto USB. La interfaz por lo tanto también digitaliza los valores de tensión de las entradas.
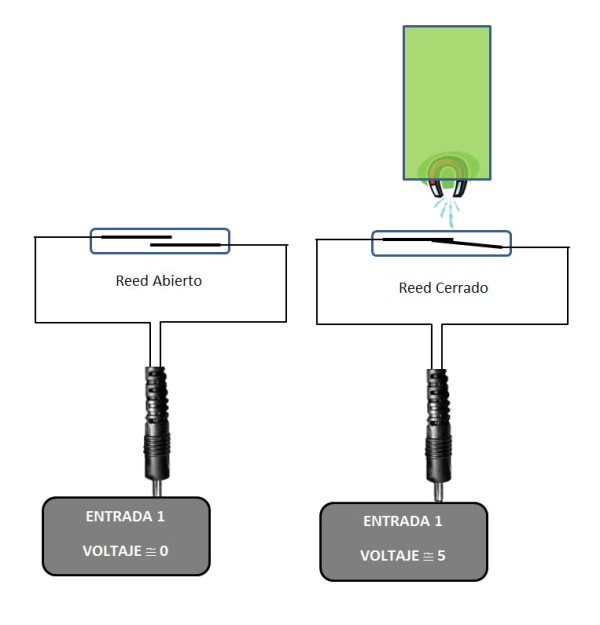
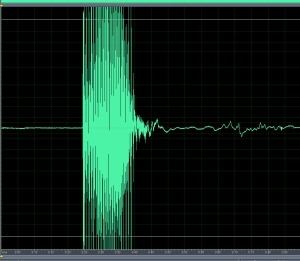
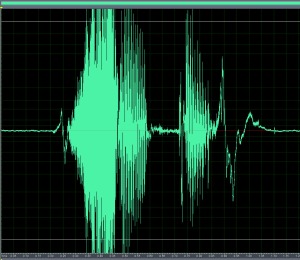
Los REED son sensores de 2 estados ya que son interruptores. Por lo tanto si el REED está abierto el voltaje del circuito será aproximadamente 0 Volts, pero si el REED está cerrado, el voltaje será aproximadamente 5 Volts, como se ve en la figura de abajo.
Si tuviésemos un tester veríamos el voltaje en un display, pero el software de la interfaz, basado en el lenguaje FMS LOGO, tiene un comando reportero VOLTAJE, que reporta el valor del voltaje de la entrada activa.
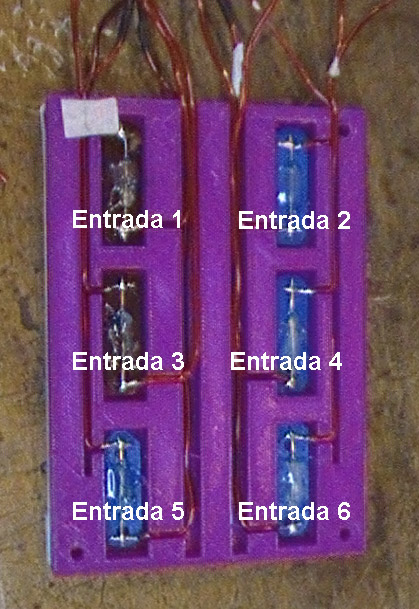
Cada REED se conectó a una de las entradas de la interfaz en el orden lógico de la lectura, tal como se ve en la imagen de abajo.
PROGRAMACIÓN LOGO
El procedimiento TESTBRAILLE permita testear los 6 REED
PARA TESTBRAILLE
entrada 1; activa la entrada 1
make «v1 voltaje; almacena en una memora llamada v1 el valor de voltaje de la entra activada
entrada 2; activa la entrada 2
make «v2 voltaje; almacena en una memora llamada v2 el valor de voltaje de la entra activada
entrada 3; activa la entrada 3
make «v3 voltaje; almacena en una memora llamada v3 el valor de voltaje de la entra activada
entrada 4; activa la entrada 4
make «v4 voltaje; almacena en una memora llamada v4 el valor de voltaje de la entra activada
entrada 5; activa la entrada 5
make «v5 voltaje; almacena en una memora llamada v5 el valor de voltaje de la entra activada
entrada 6; activa la entrada 6
make «v6 voltaje; almacena en una memora llamada v6 el valor de voltaje de la entra activada
(es :v1 :v2 :v3 :v4 :v5 :v6); escribe en pantalla los valores de las 6 memorias definidas. TESTBRAILLE; crea un ciclo (loop).
FIN
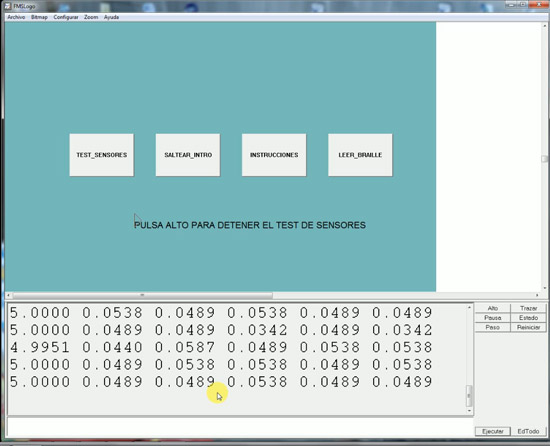
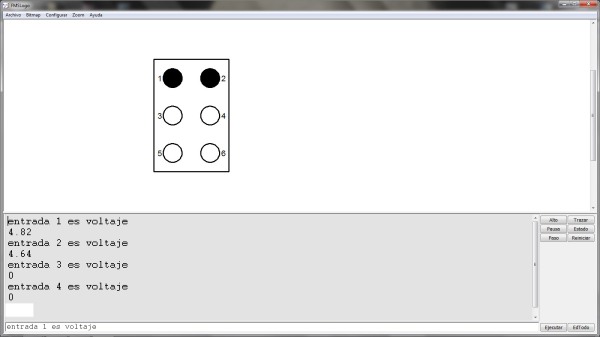
En LOGO los ciclos reciben el nombre de procedimientos recursivos. Los valores de voltaje se escribirán en la pantalla en forma repetida hasta que se presione el botón ALTO de la consola de comandos. Al ejecutar el procedimiento veríamos lo siguiente:
En este caso la Entrada 1 está en 5 Volts y las demás entradas en aproximadamente 0 Volts. Esto significa que se ha colocado un imán en el primer agujero (relieve) y los demás están vacíos. En el código BRAILLE correspondería a la letra A.
Los valores de voltaje no son exactamente iguales entre las entradas y además varían para una misma entrada. De manera que creamos un procedimiento llamado LEERCAJA que crea una lista de 1 y 0 de acuerdo al valor del voltaje. Esto es equivalente a ver una imagen de colores en blanco y negro. Por arriba de cierto valor de luz el color se verá blanco y por debajo negro. En este caso por arriba de 4 volts se guardará un 1 y por debajo un 0.
Este procedimiento activa la ENTRADA 1 y si el VOLTAJE es > 4 (Hay una pieza colocada) crea una memoria de nombre A1 con valor 1 [MAKE A1 1] y si no la crea con valor 0 [MAKE «A1 0]. Hace lo mismo con cada una de las entradas. Luego crea la memoria llamada SIGNO con el valor de una LISTA con los 6 valores definidos: MAKE «SIGNO (LISTA :A1 :A2 :A3 :A4 :A5 :A6) y finalmente escribe en pantalla el valor de esa memoria: ES :SIGNO
Para el caso de la A [1 0 0 0 0 0 0]
Para la F [1 1 1 0 0 0]
Para la P [1 1 1 0 1 0]
Para la C [1 1 0 0 1 1]
Para el . [0 0 1 1 0 1]
El procedimiento DECOWAV mediante reglas instruye que fonema le corresponde a una combinación de 1 y 0.
El comando PLAYWAVE ejecuta el archivo WAV especificado. Los alumnos grabaron todas las letras y editaron los archivos para uniformar las duraciones y sobre todo la amplitud de cada fonema. Utilizaron un soft conocido por ellos que se trabaja en 6° y 7° grado y especialmente en 2° año.
El 0 que aparece luego del nombre del archivo (PLAYWAVE «A.WAV 0) es uno de los modificador del comando. Implica que el procedimiento debe esperar la terminación del archivo de sonido para seguir leyendo instrucciones.
A.WAV
Z.WAV
NIKNAME
Pensando en la dificultad de tener que escribir el nombre del procedimiento y luego ENTER, creamos el procedimiento J
PARA J
DECOWAV
FIN
En los teclados las teclas J y F tienen una pequeña muesca en relieve para identificarlas al tacto. Aunque es muy sencillo pegar una textura sobre cualquier tecla, adoptamos la J como NICKNAME del procedimiento de decodificación.
En diciembre cuando llevamos todo el sistema, la maestra nos sugirió que sería mejor que solo tuviese que apretar ENTER, de manera que modifiqué los procedimientos para lograrlo, además de agregar una botonera para facilitar la activación por parte de la docente. Hay una etapa de preparación de los cables y de la interfaz y carga del software, que ella debe realizar, pero una vez superada esta etapa, el chico sólo debe colocar las piezas en los agujeros y apretar ENTER para ejecutar el procedimiento DECOWAV.
Este video resume las etapas y los trabajos realizados.
TELEOLOGÍA
Del griego τέλεος, fin, y λογία,discurso, tratado o ciencia.
En un sentido amplio podríamos definir la teleología como lo que da sentido y finalidad a lo que somos y hacemos. Muchas veces nos preguntamos para qué enseñamos, para qué aprendemos. Este proyecto me encuentra en un momento de la vida, cerca del retiro, donde estas preguntas encuentran a menudo respuestas pesimistas.
Pero, por un lado tener una idea y concretarla con los medios y conocimientos que uno posee y que funcione es una experiencia muy poderosa y una gran satisfacción. Pero además es una experiencia compartida.
La metodología de taller que hemos adoptado desde nuestros inicios es básicamente «conocimiento en acción». Dice la Wikipedia: «El trabajo por talleres es una estrategia pedagógica que además de abordar el contenido de una asignatura, enfoca sus acciones hacia el saber hacer, es decir, hacia la práctica de una actividad. En esencia el taller “se organiza con un enfoque interdisciplinario y globalizador, donde el profesor ya no enseña en el sentido tradicional; sino que es un asistente técnico que ayuda a aprender. Los alumnos aprenden haciendo y sus respuestas o soluciones podrían ser en algunos casos, más válidas que las del mismo profesor.» Parecen palabras sacadas de Desafío a la mente o de tantos maestros que me transmitieron la filosofía Logo.
Por otro lado, he enseñado por muchos años y tengo la satisfacción de encontrar un grupo de alumnos (he sido su profesor desde 6° grado) que poseían todas las herramientas cognitivas, laboriosamente adquiridas, para no sólo entender el problema sino para llevar a cabo una solución. Es un momento único, cuando todos los involucrados nos damos cuenta que «Aprender da sentido».
Claro que no sólo hubo una motivación académica. Es imposible acercarse a Fátima y permanecer indiferentes y al menos este año, los alumnos que participaron mostraron una extraordinaria sensibilidad y disposición para llevar a cabo la tarea. Me encontré con un grupo de alumnos movilizados por un gran espíritu solidario y dueño de una adecuada formación académica para superar el desafío. Y por supuesto un colegio que impulsó esta relación con convicción y puso todos los medios necesarios.
GENERADOR BRAILLE VIRTUAL
Promediando el proyecto, ante la demora producida por los tiempos de impresión y la necesidad de explorar la programación, hice procedimientos para generar un generador Braille «virtual» y simular los comandos de los sensores. La pantalla del FMS LOGO se vería así:
El reportero VOLTAJE hasta simula la imperfección del reportero de la interfaz.
El procedimiento DATOS te da información.
B1, B2, B3, B4, B5, B6 colocan las piezas virtuales (En la figura se han ejecutado B1 y B2)
Con esta caja virtual pudimos avanzar en la programación sin tener el generador a nuestra disposición. Los procedimientos están en el PDF que sigue (no puedo insertar un archivo LGO ni TXT en el Blog.). Copiá los procedimientos y pegalos en el editor del FMS LOGO. Genera una letra en código BRAILLE y los programas necesarios para que LOGO diga o escriba la letra correspondiente.
Archivo PDF: CAJA BRAILLE VIRTUAL
Seré el último de los mohicanos pero, LOGO da sentido.
La probabilidad lejos de ser solo una herramienta matemática, es un concepto que nos sumerge en dilemas existenciales y hasta diría religiosos, pues qué es un «milagro» sino el cumplimiento de un evento altamente improbable?.
En todas sus acepciones la «probabilidad» se abraza al concepto de incertidumbre. Como en el interior de un átomo. el principio de incertidumbre de Heisenberg se proyecta sobre la existencia y podemos afirmar que no hay certezas, sino probabilidades. La falta de certeza puede traernos incomodidad, pero si la miramos del lado positivo, alcanza también a la enfermedad y la muerte.
En LOGO la probabilidad se relaciona con el comando AZAR. Un comando que nos permite incluir «sorpresa», «eventos inesperados», «desestructuración», «juego», experimentación de ideas y conceptos, y «inducción en lugar de deducción».
ESPIRAL 20 90
ESPIAZAR 20 90
ESPIAZAR 20 90
ESPIAZAR 20 90
PARA ESPIRAL :a :b
si :a > 300 [alto]
av :a
gd :b
ESPIRAL :a + 5 :b
fin
PARA ESPIAZAR:a :b
si :a > 300 [alto] poncl azar :a av azar :a
gd :b
ESPIAZAR :a + 5 :b
fin
PROBABILIDAD MATEMÁTICA Y ESTADÍSTICA
La matemática intenta medir la probabilidad de que un evento suceda. Un caso simple lo constituye los juegos de dados.
¿Cuál es la probabilidad de tirar un dado y sacar un 1? En este caso la probabilidad depende exclusivamente de la suerte, a menos que el dado esté cargado. Nos gustaría pensar que la forma de tirar el dado influye en algo en el resultado, pero NO. Hay una sola cara que contiene un 1 y 6 caras posibles. P(1) = 1/6. La definición clásica de la probabilidad es el cociente entre el N° de casos favorables y el N° casos posibles.
P(1) = 1/6
P(2) = 1/6
P(3) = 1/6
P(4) = 1/6
P(5) = 1/6
P(6) = 1/6
¿Cuál es la probabilidad de sacar un número par? Los casos favorables son 3: 2, 4 y 6. P(par) = 3/6 = 1/2
Si saco un 1 y luego tiro de nuevo el dado, ¿cuál es la probabilidad de sacar 1 nuevamente? P(1,1) = 1/6. Los dados no tienen memoria.
PROBABILIDAD Y ESTADÍSTICA
¿Cuál es la probabilidad de que caiga un avión? ¿Cuál es la probabilidad de que haya sobrevivientes? ¿Cuál es la probabilidad de morir antes del año? ¿Cuál es la probabilidad de desarrollar una efermedad o de sobrellevarla?
Estas probabilidad deben determinarse por un camino «inductivo», es decir mediante estadísticas que permitan realizar un conteo de estos eventos y compararlos con el total de eventos. Son las estadísticas las que permiten afirmar: «Estadísticamente hablando, si ambos padres tienen diabetes tipo 1, hay un 30% de probabilidad de que el niño desarrolle diabetes tipo 1. Si es sólo la madre con diabetes tipo 1, hay 4% de probabilidad de que los hijos nacidos antes de cumplir los 25 años tienen diabetes tipo 1. Si la madre cruzó de 25 años de edad, se encuentra a sólo 1% de probabilidad de que el niño desarrolle diabetes. En caso de que el padre, hay 6% de probabilidad de su hijo desarrolle diabetes».
PROGRAMACIÓN, DADOS Y ESTADÍSTICA
Los siguientes problemas de programación fueron planteados a mis alumnos de 5° del colegio Bayard. El objetivo era doble, por un lado averiguar si el comando AZAR se regía por las leyes de la probabilidad matemática y por otro determinar si la probabilidad matemática (o deductiva) concordaba con la probabilidad estadística (o inductiva). Para ello, habría que crear procedimientos que simulasen el tiro de un dado, tirar el dado virtual N veces y contar los eventos.
El comando AZAR es un comando paramétrico, necesita un parámetro numérico que determine la cota superior del intervalo de números posibles. La cota inferior es el 0. Por ejemplo:
ES AZAR 100; escribirá un número al azar entre el 0 y el 99. El parámetro (100) no está incluído en el intervalo.
ES AZAR 16; escribirá un número al azar entre el 0 y el 15. El parámetro (16) no está incluído en el intervalo.
En EXCEL hay 2 funciones relacionadas con el AZAR: ALEATORIO Y ALEATORIO.ENTRE
El primero demanda un parámetro vacío: ALEATORIO() y devuelve un número >=0 y < 1.
El segundo demanda 2 parámetros, la cota inferior y la superior del intervalo. ALEATORIO.ENTRE(1;10), devolverá un número entero entre 1 y 10, incluyendo los extremos.
Podemos crear un comando AZAR.ENTRE similar al ALEATORIO.ENTRE del Excel.
PARA AZAR.ENTRE :A :B
DEV :A + AZAR (:B – :A + 1)
FIN
ES AZAR.ENTRE 3 10; devolverá un numero contenido en el intervalo [3 10], ya que (10- 3 + 1)= 8 y 3 + AZAR 8 podrá generar los siguientes valores.
AZAR
3 + AZAR 8
Mínimo = 0
3 + 0 = 3
Máximo = 7
3 + 7 = 10
DADO VIRTUAL
Para generar un dado virtual podemos utilizar
ES AZAR.ENTRE 1 6 ó ES 1 + AZAR 6
Los alumnos resolvieron el problema mediante los siguientes procedimientos (que han sido levemente alterados por mí para esta presentación)
El procedimiento principal es TIRAR :N donde :N es un INPUT por donde ingresar la cantidad de tiros que se desea realizar.
PARA TIRAR :N; procedimiento principal
MAKE «UNO 0; make define una memoria de nombre «UNO y valor o.
MAKE «DOS 0 ; make define una memoria de nombre «DOS y valor o.
MAKE «TRE 0; make define una memoria de nombre «TRE y valor o.
MAKE «CUA 0; make define una memoria de nombre «CUA y valor o.
MAKE «CIN 0; make define una memoria de nombre «CIN y valor o.
MAKE «SEI 0; make define una memoria de nombre «SEI y valor o.
MAKE «REP :N; ; make define una memoria de nombre «REP y con el valor que se ingresará por :N.
REPITE :REP [TIRO]; repite N veces el procedimiento anidado TIRO
RESULTADOS; genera los resultados de los contadores y las probabilidades
FIN
UNO, DOS, TRE, CUA, CIN, SEI son contadores donde se contarán las veces que sale el número correspondiente. Cuando salga el 1 el contador «UNO deberá incrementarse en 1, cuando salga 2 el contador «DOS deberá incrementarse en 1, etc. Estos incrementos están el en procedimiento TIRO.
PARA TIRO
MAKE «DADONUM 1 + AZAR 6 ; make define una memoria de nombre «DADONUM con el «valor del dado virtual»
SI :DADONUM = 1 [MAKE «UNO :UNO + 1]; Si el valor de DADONUM (:DADONUM) es = 1 se incrementa el contador «UNO en :UNO + 1
SI :DADONUM = 2 [MAKE «DOS :DOS + 1]; Si el valor de DADONUM (:DADONUM) es = 2 se incrementa el contador «DOS en :DOS + 1
SI :DADONUM = 3 [MAKE «TRE :TRE + 1]
SI :DADONUM = 4 [MAKE «CUA :CUA + 1]
SI :DADONUM = 5 [MAKE «CIN :CIN + 1]
SI :DADONUM = 6 [MAKE «SEI :SEI + 1]; Si el valor de DADONUM (:DADONUM) es = 6 se incrementa el contador «SEI en :SEI + 1
fin
Nótese que «UNO significa el nombre de la memoria y :UNO el contenido de la misma.
Al final de los N tiros
:UNO será la cantidad de veces que salió el 1
:DOS será la cantidad de veces que salió el 2
y así sucesivamente hasta :SEI que será la cantidad de veces que salió el 6
Finalmente el procedimiento RESULTADOS escribirá en pantalla la cantidad de veces que salió cada número y la probabilidad de cada uno determinada como el cociente entre las veces que salió el número y la cantidad de tiros (:REP).
:UNO / :REP será la probabilidad estadística de que salga 1, etc.
Como vemos en 10 tiros es probable que algunos números no salgan. Como el 4 y el 5. Las probabilidades estadísticas son desparejas. Debemos hacer más tiros. Por supuesto que si tiramos de nuevo TIRAR 10 los valores resultantes serán diferentes.
Claramente las probabilidades de cada número se han acercado a 1/6 y podemos demostrar por este camino que cuando el número de tiros tienda a infinito todas las probabilidades serán 1/6.
Al mismo tiempo demostramos que aunque no separmos como genera sus valores, el AZAR funciona respetando las reglas de la probabilidad.
Podemos utilizar este método para averiguar:
Cuál es la probabilidad de sacar consecutivamente 2 números iguales.
Cuál es la probabilidad de sacar consecutivamente 5 números iguales. (Generala)
Cuál es la probabilidad de sacar consecutivamente 4 números iguales. (Póker)
Cuál es la probabilidad de sacar una escalera. (Escalera)
Aunque en realidad no disponemos de 5 dados virtuales, sino 1 solo que tiramos más de una vez, los resultados serían los mismos, pues cada dado es autónomo, no tiene memoria ni es influenciado por los demás.
Ahora pasemos a investigar la sumatoria de 2 dados, operación que es la base de un popular juego de dados denominado CRAP o SIETE GANA.
CRAP
El siguiente problema está relacionada con un juego de dados denominado CRAP o Pase inglés. Se juega tirando 2 dados.
Cuando se juega en un casino contra la banca, o casa, uno o varios jugadores realizan diversas apuestas al resultado que se obtendrá en los dados que lance alguno de los jugadores, el cual es designado «tirador» o «shooter» por su nombre en inglés. Para comenzar el juego, durante lo que se conoce como «tiro de salida», el jugador necesita realizar una apuesta que se conoce como «línea de pase», en la que se busca obtener un siete (conocido como «siete natural» o «siete ganador») o un once en la combinación de dados para ganar la apuesta, que paga uno a uno. Si por el contrario obtiene un dos, tres o doce (números conocidos como «craps») pierde automáticamente su apuesta y necesitará colocar de nuevo una apuesta para seguir tirando. Si durante el primer lanzamiento no obtiene un siete u once (con que gana), o un dos, tres o doce (con que pierde), el juego entrará en una segunda etapa más compleja.
¿Cuál es la posibilidad de tener un tiro ganador o un crap?
La resolución puede encararse matemáticamente o estadísticamente.
Para la primera recurrí a presentar los datos en una planilla EXCEL.
Para la segunda nuevamente la programación en Logo de N tiros de ambos dados para contar las combinaciones resultantes.
PLANILLA EXCEL
Las celdas sombreadas son datos.
CÁLCULOS
La columna C es una sumatoria: =A2+B2
La cantidad de combinaciones por sumatoria (columna F) se calcula con la función CONTAR.SI.
En la celda F2 =CONTAR.SI(C2:C37;E2) cuenta las veces que la suma de ambos dados es = 2.
La probabilidad de que la suma sea 2 es= F2 / 36 expresado en formato %. (36 son las combinaciones posibles)
Como se observa la P(suma = 2) = P(suma = 12) y la probabilidad máxima es P(suma=7) pues tiene la máxima cantidad de combinaciones favorables.
PROGRAMACIÓN LOGO
PARA DADOSCRAPS :N
MAKE «S2 0; memoria donde se almacena la cuenta de veces que la sumatoria de ambos dados es = 2
MAKE «S3 0; idem suma = 3
MAKE «S4 0; idem suma = 4
MAKE «S5 0; idem suma = 5
MAKE «S6 0; idem suma = 6
MAKE «S7 0; idem suma = 7
MAKE «S8 0; idem suma = 8
MAKE «S9 0; idem suma = 9
MAKE «S10 0; idem suma = 10
MAKE «S11 0; idem suma = 11
MAKE «S12 0; idem suma = 12. Todas con valor inicial 0.
MAKE «REPE :N; memoria donde se guarda la cantidad de tiros ingresada.
REPITE :REPE [MAKE «D1 1 + AZAR 6; En la memoria D1 se almacena el tiro virtual del primer dado
MAKE «D2 1 + AZAR 6; En memoria D1 se almacena el tiro virtual del primer dado
SI (:D1 + :D2) = 2 [MAKE «S2 :S2 + 1]; Si la suma de los dados es 2 se incrementa la memoria S2 en :S2+1
SI (:D1 + :D2) = 3 [MAKE «S3 :S3 + 1]
SI (:D1 + :D2) = 4 [MAKE «S4 :S4 + 1]
SI (:D1 + :D2) = 5 [MAKE «S5 :S5 + 1]
SI (:D1 + :D2) = 6 [MAKE «S6 :S6 + 1]
SI (:D1 + :D2) = 7 [MAKE «S7 :S7 + 1]
SI (:D1 + :D2) = 8 [MAKE «S8 :S8 + 1]
SI (:D1 + :D2) = 9 [MAKE «S9 :S9 + 1]
SI (:D1 + :D2) = 10 [MAKE «S10 :S10 + 1]
SI (:D1 + :D2) = 11 [MAKE «S11 :S11 + 1]
SI (:D1 + :D2) = 12 [MAKE «S12 :S12 + 1]] RESULTADOS;procedimiento anidado
FIN
Como puede verse en la figura de la planilla de EXCEL los valores determinados por el procedimiento (valores estadísticos) coinciden con los valores del EXCEL (matemáticos).
TECNOLOGÍA SUSTITUTIVA Y TECNOLOGÍA EXTENSIVA
La determinación «empírica» de la probabilidad en estos casos, es un claro ejemplo de como la programación puede ampliar las posibilidades de exploración, investigación, análisis y síntesis, por el camino de la inducción, partiendo de los datos experimentales (obtenidos en este caso virtualmente) y yendo de allí a las conclusiones. La obtención virtual de datos introduce al alumno a una problemática de programación superior que necesita el desarrollo de funciones complejas del pensamiento. En otras palabras extiende el campo de acción de la mente, dándole alas para explorar conceptos y técnicas por otros caminos, como un drone que nos muestra otra perspectiva del mundo plano donde nos movemos.
INTRODUCCIÓN A LA PROGRAMACIÓN CON MEMORIAS
Estos videos fueron preparados como tutoriales
INTRODUCCIÓN: CREACIÓN DE MEMORIAS EN LOGO PARTE 2
INTRODUCCIÓN: CREACIÓN DE MEMORIAS EN LOGO PARTE 3
INTRODUCCIÓN: CREACIÓN DE MEMORIAS EN LOGO PARTE 4
La práctica puede o no ser perfecta, pero la física sin práctica es estéril. Las leyes de la física nos dicen cómo trabaja el universo. Para comprender verdaderamente estas leyes tenemos que verlas trabajando. Tenemos que ver por ejemplo, cómo se combinan las leyes del movimiemto y las de gravitación universal para generar las órbitas elípticas de los planetas. Sin esta confirmación, las leyes de la física son solamene las leyes de la física, y no las leyes de la naturaleza.
Las leyes básicas de la física no son especialmente difíciles de comprender.Sin embargo, su aplicación a situaciones más complejas es difícil. Para determinar las órbitas de los planetas, por ejemplo, tenemos que resolver dos ecuaciones de segundo grado acopladas, no lineales. Aunque una solución matemática a estas ecuaciones es difícil, una solución numérica es elemental. Podemos aplicar el mismo método numérico para movimiento de proyectiles, movimiento de planetas, viajes espaciales, osciladores armónicos, desintegración radiactiva, zorros que comen conejos que comen hierba y muchas otras situaciones.
Pero una vez que el ordenador ha determinado la solución numérica, te das cuenta que has creado un monstruo. Te encuentras inundado con un alud de datos y debes afrontar el segundo problema generado por las soluciones numéricas. ¿Cómo interpretar todos esos números? La respuesta más satisfactoria la consigues gracias a los gráficos. Si se trata de una trayectoria, dibújala. Si no es una trayectoria trata entonces de encontrar alguna forma de dibujar los resultados: número de partículas radiactivas en función del tiempo, posición en función del tiempo, pendiente en función del desplazamiento, número de conejos en función del número de zorros.
Hay muchos lenguajes de programación capaces de generar gráficos. Según este texto, Logo es el más flexible para esta aplicación y el más fácil de aprender. Es el más flexible gracias a su amplio vocabulario gráfico. Es el más fácil de aprender, porque permite comunicarse con el ordenador de forma muy similar a la que las personas se comunican entre sí. Logo es un lenguaje de procedimientos (o modular). Permite definir nuevas palabras, que tendrán el mismo estatus que los comandos primitivos. Estas nuevas palabras pueden ejecutarse por sí mismas o como parte de otro procedimiento.
Extraído del Prólogo de Física con Logo de Richard D. Hurley (Ediciones Anaya 1986)
MÉTODO NUMÉRICO y MÉTODO ANALÍTICO
El método numérico es extensivo, el analítico comprensivo. Por ejemplo si tuviésemos que expresar el conjunto de números enteros pares entre 1 y 10, el método numérico los definiría [2 4 6 8 10], el método analítico los definiría N ^ Resto N/2 = 0 y N> 1 y N<=10.
La ventaja del método analítico se vería si tuviésemos que definir el mismo conjunto entre 1 y 1000.
En física podríamos definir numéricamento la trayectoria parabólica de un objeto fotografiandolo y midiendo los valores posicionales.
El método analítico plantearía las ecuaciones del movimiento para determinar las posiciones en función del tiempo.
Hurley plantea en el prólogo que el método numérico provee de una gran cantidad de información que no es sencilla de interpretar a menos que podamos graficarla. Por ende valora al Logo, pues en el año de publicación de su libro aparecía con un gran potencial gráfico respecto a los lenguajes y softwares de esa época. Hoy todo ha cambiado, pero para mal, ya que los softwares son tan poderosos que «sustituyen» las operaciones mentales de los alumnos e impiden todo proceso de aprendizaje comprensivo.
Al mismo tiempo hay que reconocer que los procedimientos mostrados por Hurley y los que mostraré en el tema Tiro oblicuo no son sencillos de interpretar y construir y en mi opinión se adecúan más a niveles universitarios. De hecho los temas del libro de Hurley exceden las temáticas que encontramos en el nivel medio.
ORGANIZACIÓN ANIDADA
Estos temas están organizados en capítulos (18 en total) que asemejan procedimientos anidados. Los temas precedentes están incluídos en los posteriores. Así los 2 primeros capítulos tratan temas de Estática:
Cap. 1 – Vectores
Cap. 2 – Equilibrio de fuerzas
Temas que están incluídos en los siguientes relacionados con cinemática:
Cap. 3 – Caída libre
Cap. 4 – Movimiento del proyectil y el tubo de rayis catódicos.
Cap. 6 EL mono, el cazador y principio de equivalencia de Winstein-
Cap. 7 Velocidad de escape.
Cap. 8 El movimiento de los planetas.
Cap. 9 La música de las esferas.
Cap. 10 El Voyager II y las órbitas lunares.
Cap. 11 reactores, cohetes y la conservación del momento.
Cap. 12 El oscilador armónico, relojes, conejos y zorros.
Cap. 13 El Big Bang
Cap. 14 La desintegración radiactiva-
Cap. 15 Puntes, catenarias y el arco perfecto.
Cap. 16 Los peces y la óptica.
Cap. 17 El arco iris
Cap. 18 Las líneas del campo eléctrico y magnético.
TIRO OBLICUO
Aunque nos evoque el tiro de un cañón, el tiro oblicuo está asociado a variadas situaciones de la vida real:
Intuitivamente nos damos cuenta que el alcance y la altura de la trayectoria depende de la velocidad inicial del tiro, del ángulo inicial (medido en este caso en el sentido antihorario desde la horizontal y de la fuerza de la gravedad. Esta última es una fuerza que «afectará» negativamente la trayectoria del tiro. Una variación significativa de la aceleración de la gravedad podría tener efectos sorprendentes sobre su alcance:
PITÁGORAS Y POLYA
Como desarrollara en este blog en LAS HEURÍSTICAS EN EL AULA el teorema de Pitágoras es una expresión de una heurística general de resolución de problemas consistente en expresar un problema complejo como una combinación de problemas más simples, también llamados problemas tipo o comportamentales, que son entendibles y solucionables para el estudiante. En este caso, de las infinitas combinaciones de vectores que dan como resultante el Vector Velocidad Inicia (V0) elegimos la descomposición en los 2 vectores ortogonales V0x y V0y que se calculan mediante una relación trigonométrica básica en todo triángulo rectángulo:
V0x = V0. cos a y V0y = V0. sen a
La definición polar de un vector «plano», es decir de 2 dimensiones, está dada por 1) el módulo o intensidad y 2) la dirección del mismo, medida por 1 ángulo sexagesimal desde la horizontal en el sentido antihorario.
para vectorpolar :modulo :angulo
ponrumbo 90; orienta el vector en la horizontal
gi :angulo; orienta el vector según el ángulo dado medido desde la horizontal
pongrosor 2; duplica el grosor de la pluma
av :modulo punta re :modulo; grafica el vector Vo. (1)
ponrumbo 90; orienta el vector en la vertical
pongrosor 1; normaliza el grosor de la pluma
make «vx :modulo * cos :angulo; calcula la componente X y la almacena en la memoria «vx
make «vy :modulo * sen :angulo; calcula la componente Y y la almacena en la memoria «vy
av :vx punta (1) re :vx;gráfica la componente X del vector
gi 90
av :vy punta re :vy; grafica la componente Y del vector. FIN
(1) punta es un procedimiento anidado que dibuja una flecha.
Módulo= 250 Módulo= 250 Módulo= 250
Ángulo= 60° Ángulo= 30° Ángulo= 45°
para punta
gi 30
re 10 av 10
gd 60
re 10 av 10
gi 30
fin
MRU y MRUV
¿Qué fuerzas podrían oponerse y modificar la componente horizontal Vx? En principio podríamos considerar la resistencia del aire y el viento. Pero si el efecto de estas fuerzas las consideramos despreciables podemos aceptar que Vx es constante y por lo tanto el movimiento en la dirección horizontal es uniforme. Estamos ante un MRU (Movimiento rectilíneo uniforme)
Por otra parte la componente Vy se verá afectada por la fuerza de la gravedad (g) y tendremos un MRUV (movimiento rectilíneo uniformemente variado).
La gravedad g provocará una desaceleración de Vy hasta que la anule (punto de máxima altura) y luego cambiará el sentido hacia abajo hasta que choque el suelo. En ese momento Voy = -Vfinaly
Las ecuaciones para la velocidad en función del tiempo serán entonces:
Vxt = V0x = Constante (MRU)
Vyt = V0y ± g.t(MRUV)
Las ecuaciones para la posición del proyectil en función del tiempo:
X(t) = X0 ± Vox .t
Y(t) = Y0 ± Voy.t ± ½.g.t2
Los signos para piso ± dependerá de la convención que adoptemos. La dirección horizontal será + cuando el sentido sea de izquierda a derecha. La dirección vertical sera + hacia arriba y – hacia abajo.
La posición inicial será en nuestro caso: POS0 = [-500 -200] o sea Xo= -500 e Yo = -200
POr lo tanto las ecuaciones serán:
X(t) = -500 + Vox . t
Y(t) = -200 + Voy.t – ½.g.t2
PARA PISO
BP
MODOVENTANA; si la tortuga excede los límites de la pantalla no volverá por el lado opuesto, quedará invisible.
sl ponpos [-500 -200]; ubica a la tortuga en la posición inicial: X0 = -500 Yo= -200
bl
pongrosor 3
ponrumbo 90
repite 2 [av 1000 gd 90 av 200 gd 90]; dibuja un rectángulo de 1000 x 200 pasos de tortuga)
sl gd 45 av 50 rellena ; rellena el rectángulo con el color de pluma activo
sl ponpos [0 280] PONRUMBO 90
rotulo [TIRO OBLICUO: CURVA ESPACIO – TIEMPO]
sl ponpos [-500 -200]
ponrumbo 0
bl
fin
PROCEDIMIENTOS DEL TIRO OBLICUO
Procedimiento principal: TIROINI
PARA TIROINI
BT
DATOS
INI
FIN
El ingreso de los 3 datos: Vo, Ángulo tiro y Aceleración se realizará mediante un procedimiento de lectura de teclado mediante el comando LP (Lee Palabra). Cada dato se almacenará en una memoria definida con el comando MAKE. (PDF para profundizar el uso de comandos para lectura de inputs por teclado y definición de memorias:INPUTS POR TECLADO)
PARA DATOS
bt
es [Velocidad inicial=]
make «Vo lp
es [Angulo=]
make «ang lp
bt
es [Aceleración=]
make «ace lp
bt
(es [Velocidad inicial=] :Vo [m/seg])
(es [Ángulo=] :ang «°)
(es [Aceleración=]:ace [m/seg2])
make «Vox :Vo * cos :ang
make «Voy :Vo * sen :ang
(es [Vox=] formatonumero :Vox 5 3)
(es [Voy=] formatonumero :Voy 5 3)
fin
PARA INI
make «listapos []; define la memoria «listapos con valor [ ] donde se guardarán las posiciones.
make «listavel []; define la memoria «listavel con valor [ ] donde se guardarán las velocidades.
poncl 9
pide 1 [ot sl ponpos [-500 -200] EXPLORAR 0]
MAKE «POSFINAL ULTIMO :LISTAPOS
pide 0 [poncl 12]
sl ponpos [-500 -200] bl; ubica la tortuga en la posición inicial
ST PONRUMBO 0 GD 90 – :ANG; orienta a la tortuga en la dirección dada
TONO 2000 30
CREABOTON «MAIN «TIRAR «TIRAR 200 250 100 40 [TIRAR]; crea un botón con la acción TIRAR
CREABOTON «MAIN «TIRARVEL «TIRARVEL 200 200 100 40 [TIRARVEL]; crea un botón con la acción TIRARVEL
Es [PULSA EL BOTÓN TIRAR O TIRARVEL]
fin
PARA EXPLORAR :t
make «x -500 + :vx * :t; calcula la posición en X en función de :t (tiempo transcurrido)
make «y -200 + :vy * :t – :ace/2 * :t * :t ; idem en Y
make «velx :vx ; Calcula la velocidad en X en funciónn del tiempo :t
make «vely :vy – :ace * :t ; Idem en Y
make «listavel ponultimo lista :velx :vely :listavel; guarda las velocidades en la memora «listavel
make «listapos ponultimo lista : x :y :listapos; guarda las posiciones en la memora «listapos
si :t > 0 :y < -200 [alto] ; el lazo se detiene cuando después del tiro :y es < :y0
EXPLORAR :t + 0.05; crea un lazo con EXPLORAR incrementando :t en un Dt = 0,05 unidades tiempo.
fin
Este procedimiento recursivo (lazo) calcula los valores posicionales y de velocidad en ambas direcciones y luego los almacena en las memorias «listavel y «listapos previamente definidas en el procedimiento INI.
(PDF para profundizar la forma en que FMS LOGO almacena acumulando datos en una lista: MEMORIA DE ACUMULACIÓN)
PARA TIRAR
TIRO :listapos; grafica los valores de posición calculados en EXPLORAR y almacenados en :listapos
RESULTADOS ; reporta los resultados principales de la trayectoria
GRAFRESU ; grafica la altura máxima
BORRABOTON «TIRAR
BORRABOTON «TIRARXY
FIN
PARA TIRO :lista
si vacio? :lista [alto] ; condición de detención del lazo, cuando la lista con las posiciones se vacía.
PONRUMBO HACIA primero :lista
ponpos primero :lista TIRO mp :lista ; lazo que repite el tiro extrayendo la primera posición de la lista (MP = menos primero)
fin
PARA RESULTADOS (Calcula e informa de valores destacados)
BT
make «xmax ABS ((PRIMERO ultimo :listapos) + 500)
make «tiempo :xmax / :vx
MAKE «MEDIO ENTERO (CUENTA :LISTAPOS) / 2 + 1
MAKE «YMAX ULTIMO ITEM :MEDIO :LISTAPOS
MAKE «YMAX :YMAX + 200
MAKE «VYMAX ULTIMO PRIMERO :LISTAVEL
MAKE «VXMAX PRIMERO PRIMERO :LISTAVEL
Indudablemente que la programación de este evento no es sencilla. Pero tampoco imposible en un 4° año que tenga los conocimientos previos necesarios de programación (y de física). He tenido alumnos que han programado estos fenómenos y más aun.
Pero también es posible utilizar el sistema ya programado para realizar experiencias virtuales y complementar las soluciones analíticas con soluciones numéricas que pueden determinarse «jugando» con los parámetros del sistema.
Estas gráficas corresponden a diferentes ángulos y valores de V0= 100 y g=10. Observamos que el máximo alcance se logra con un ángulo de tiro = 45°, justamente cuando V0x = V0y.
Para V0=100 y Angulo=60°, la parábola mayor corresponde a una g=10 y la menor a g=20. Observamos que el alcance y la altura máxima son inversamente proporcionales a g. Dejamos como problema la demostración analítica de esta relación.
VARIACIÓN DE VELOCIDAD
Realizando algunos cambios podemos graficar también los vectores velocidad en función del tiempo. Las curvas así obtenidas muestran el cambio de sentido de la componente Vy.
TIRO AL BLANCO
Otra posible variación es un «juego» elemental, en el que programamos la aparición de un «objetivo» al azar y el usuario debe ingresar el ángulo de tiro (la V0 y g se fijan en el programa).
UNIDADES
Aunque lso datos ingresados y los resultados se expresan en el sistema MKS, esto constituye un error pues la unidad de desplazamiento es el pixel o paso de tortuga (pt). La unidad de tiempo no es el segundo, sino el tiempo que tarda el lazo (ciclo) en repetirse. Podríamos llamarlo tl. Por lo tanto el desplazamiento 1000 px, la velocidad 50 px/tl . Las unidades son siempre un problema, a menudo más importante que el problema mismo. Pero lo importante es que haya un coherencia interna y no sume cm con pt.
PROGRAMAS EN FMS LOGO
En el archivo tiroobllicuo programacion fms que pueden descagar están todos los procedimientos necesarios (y algunos más) para las 3 experiencias. Los procedimientos principales son: TIROINI y TIROJUEGO. El procedimiento PISO borra la pantalla y grafica el piso. El procedimiento BB borra los botones en caso de que queden en pantalla. Los procedimientos están en un documento WORD (.docx), ya que Wpress no me permite subir archivos Lgo ni Txt.
Solo tienen que copiar los procedimientos y pegarlos en el editor LOGO. Descargar procedimientos en: tirooblicuo programacion fms
UNA PROYECCIÓN DE NOSOTROS
Por supuesto que soy escéptico respecto a la aplicación de todo esto en la escuela. Después de 35 años he visto demasiado como para ilusionarme. Es interesante que LOGO, como no lo hace ninguna otra aplicación, desnuda nuestros intereses y capacidades. Basta observar los temas desarrollados por Hurley para darse cuenta que lo que hacemos con LOGO es una proyección de nuestra propia mente. Esta propiedad es maravillosa, pero a veces también asusta.
Una continuación de esta relación entre Logo y la Física sera la aplicación de sensores para la toma de datos. Experiencias que toman un matiz más numérico que analítico y que permiten investigar, almacenar datos y sacar conclusiones cualitativas y reconocer relaciones entre los fenómenos y sus variables.
Platón escribió sobre la puerta: «Que sólo entren los geómetras». Los tiempos han cambiado. La mayoría de aquellos que ahora buscan ingresar al mundo intelectual de Platón ni saben matemática ni experimentan contradicción en un desobediencia al mandato. La escisión patológica de nuestra cultura entre «humanidades» y «ciencia» apuntala su seguridad. Platón era un filósofo, y la filosofía pertenece a las humanidades con la misma certeza con que la matemática pertenece a las ciencias».
Seymour Papert, Desafío a la Mente. Cap. 2
Una de las característica que más he apreciado del movimiento Logo iniciado en los 80 en Argentina es que sus iniciadores tenían en común un enfoque quasi renacentista, donde se integraban las ciencias duras, entre ellas la computacional, con las humanidades. La filosofía, el arte, la educación como práctica y como ámbito de reflexión, eran una constante en su discurso de capacitación. Yo fui particularmente sensible a este enfoque. Ya cuando estaba en el profesorado de química me fascinaban las clases de Filosofía, al punto que el docente me incitaba a abandonar la química. Creo que era el único de los 25 que conformaban el curso que participaba de ese entusiasmo. Para el resto la filosofía no tenía nada que hacer en el ámbito de la ciencia.
LOGO, más allá de sus cualidades como lenguaje de programación, me impactó en esa época porque lo relacioné enseguida con el concepto del Logos enunciado por Heráclito en los albores de la Grecia clásica. Pero también tenía para mi hasta ecos religiosos. El Evangelio de Juan (año 100 DC), muy influenciado por la filosofía griega, fue escrito en griego. Su primer versículo dice: «En el principio era el Verbo, y el Verbo era con Dios, y el Verbo era Dios». La palabra original traducida por Verbo era justamente LOGOS. En el principio era el LOGOS. Los nombres son importantes por los significados que les damos. En comparación, SCRATCH ¿qué puede significarme?.
Pero no todo era filosofía y religión. Mientras la mayoría de mis compañeros veían una tortuga yo veía un vector. Cada imagen programada con dificultad era una suma vectorial. Cuando hice un círculo me di cuenta que la tortuga generaba la curva mediante una sucesión de «diferenciales». El rumbo (o sea la inclinación de la tangente) de cada diferencial variaba en forma lineal, porque que la derivada de una cuadrática es una función lineal.
Todo esto era muy poderoso. Además te daba poder para generar infinitas formas y entender conceptos complejos. La tortuga era un objeto matemático serio, un invento genial. En 30 años no he visto nada igual.
Y todo esto se comunicaba mediante el LOGOS, la palabra, el verbo, la acción, que la tortuga mediatizaba en la pantalla.
VECTORES Y DIFERENCIALES
PITÁGORAS: MATEMÁTICA Y MISTICISMO
Pitágoras nació en el 569 AC en la isla de Samos, en el paradisíaco mar Griego, casi pegado a Persia. No hay muchos datos sobre su vida. No dejó ningún escrito y todo lo que sabemos es por medio de sus discípulos que habitualmente le atribuyeron todos sus descubrimientos.
Por ellos sabemos que viajó por el mundo civilizado de entonces, especialmente Egipto y Babilonia, culturas que influyeron intensamente en sus conocimientos y vida. Los egipcios son considerados los «inventores» de la geometría, palabra que significa «medición de la tierra», y cuyos conocimientos aplicaban a marcar las tierras que anualmente eran barridas por el Nilo. Desarrollaron una aritmética empírica y utilitaria, aunque suelen encontrarse con papiros conteniendo problemas abstractos. Los egipcios conocían las relación de la tríada [3 4 5], una de las tríadas formada por números enteros que cumplen con la relación pitagórica. En Babilonia además de conocimientos astronómicos, Pitágoras recibió de los sacerdotes que ejercían la ciencia matemática, la convicción de una relación imprescindible entre matemática y religión.
De regreso a Samos se destacó como un hombre de extraordinario intelecto pero al mismo tiempo de ideas exóticas que evolucionarían hacia una nueva religión basada en la creencia de que la materia con que está hecho el Universo es el número. Su creencia estaba alimentada no solo por la religiosidad que había absorbido en los astrónomos y matemáticos babilónicos, sino por la matemática misma que permitía describir un orden en las relaciones de la belleza, de los intervalos musicales y del movimiento de los planetas. Si nos ponemos a pensar, es sorprendente que casi todo sea «numerable» o «calculable». Hasta el alma parece que pesa 21 gramos. Esa admiración se transformó en una nueva religión que sobrevivió varios siglos a su creador. Sus ágoras académicos se transformaron en una Gran Hermandad, sus alumnos pasarían a ser sus discípulos y él, su profeta.
A Pitágoras se le atribuye la invención del álgebra y del método deductivo que utiliza para realizar demostraciones imposibles desde el método empírico. Por ejemplo los egipcios sabían que la raíz de 2 no podía reducirse a un número fraccionario. Siempre que se divide se llega a un resto diferente de 0. Puedo hacer la división hasta 100000 veces pero, ¿cómo saber que en la 100001 se llegará al mismo resultado?. Pitágoras demostró la irreductibilidad de la raiz de 2 mediante el método de reducción al absurdo. Sus genialidades se ven opacadas por suspuestos religiosos que no tenían la rigurosidad de su pensamiento, por ejemplo los números tenían sexo, machos los impares, hembras los pares. Enseñaba que el primer número era el 3, pues el 1 era indivisible y el 2 hembra :=). El 5 se asociaba al matrimonio pues era la suma del primer número hembra con el primer número macho. «Pitágoras y su teorema en 90 minutos» de Paul Strathern, es un breve texto que describe amenamente el pensamiento y la religiosidad del gran matemático.
Escultura de Pitágoras en Samos.
EL TEOREMA DE PITÁGORAS
Me he sorprendido al leer el texto de Strathern que el teorema tiene más de 400 demostraciones diferentes. Los chinos dejaron una de ellas en un texto del Siglo V AC. En su forma simplificada puede verse abajo. Se trata de un cuadrado cuyo lado es la suma de las longitudes de 2 catetos a y b, siendo d la hipotenusa del triángulo rectángulo. A su vez d es el lado del cuadrado grisado. Según Strathern esta demostración encierra una gran belleza.
Sup. Cuadrado externo = (a + b)2
Sup. triángulo = b*a/2
Sup. cuadrado gris = d2
d2 = (a + b)2 – 4. (a*b/2)
d2 = a2 + b2 + 2ab – 2ab
d2 = a2 + b2
Como d es la hipotenusa del triángulo y a y b sus catetos
H2 = a2 + b2
Con lo que queda demostrada la relación.
PROGRAMANDO LA CAJA CHINA
Programemos en FMS LOGO un procedimiento con 2 inputs que definen los 2 catetos :A y :B. No incluiremos el relleno del cuadrado interior.
PARA CAJA_CHINA :A :B
REPITE 4 [AV :A GD 90 AV 5 RE 10 AV 5 GI 90 AV :B GD 90]
AV :A
MAKE «HIPO POTENCIA :A*:A+:B*:B 1/2 (calcula la hipotenusa aplicando Pitágoras) (1)
MAKE «ANG ARCTAN :A/:B (calcula el ángulo que debe girar para trazar el segmento d)
GD :ANG
REPITE 4 [AV :HIPO GD 90]
FIN
(1) POTENCIA es un comando Logo con 2 inputs POTENCIA BASE EXPONENTE. El exponente 1/2 corresponde a una raíz cuadrada.
EL TEOREMA, 1/3 DE LA FELICIDAD
He enseñado a muchas generaciones que el conocimiento del Teorema de Pitágoras nos asegura 1/3 de la felicidad. Claro que se trata de una hipérbole (no hipérbola), que enfatiza el poder y la importancia del pensamiento matemático y particularmente algebraico.
Los otros 2/3 los dejo para otra oportunidad.
Sucede que me he encontrado con este teorema en innumerables problemas especialmente de física. Así en la suma vectorial el método cartesiana consiste en reducir cada vector a sus 2 componentes ortogonales Vx y Vy (en el plano) Las componentes ortogonales pueden sumarse aritméticamente pues están en la misma dirección y las resultantes ortogonales quedan conectadas con la resultante mediante Pitágoras.Es un caso especial de una heurísitica que reduce un problema complejo a problemas simples.
En cierta forma ésto es parte de la felicidad.
TRIÁNGULOS PITAGÓRICOS
Se denominan así a aquellos cuyos catetos e hipotenusa tienen longitudes enteras. Ya hemos mencionado que los egipcios conocían la tríada [3 4 5], ya que 32 + 42 = 52
ESCUADRA MECCANO 3 4 5
Yo me encontré con esta tríada cuando intentaba realizar una escuadra con Meccano. Las piezas Meccano pueden medirse por sus agujeros que son proporcionales a la longitud de la pieza. Una tira de 6 agujeros tiene 5 espacios, las de 5 agujeros, 4 espacios y la de 4 agujeros, 3 espacios. Una escuadra se determina por piezas que tengan una relación de espacios enteras, ya que no se puede poner un tornillo a 4,5 espacios. Esta es una razón para tener un stock de tiras de 6 agujeros (5 espacios) pues se utilizaran con mayor frecuencia que otras.
¿Qué otras tríadas pitagóricas hay de números enteros?. Son infinitas.
Hagamos un procedimiento LOGO que por iteración busque esas tríadas para valores entre 1 y 100.
PARA ENTERO? :NU
DEV (ENTERO :NU) = :NU
FIN
PARA PITAENTEROS
MAKE «SOLUTIONS []
PITAENTERO2 1 1
ES CUENTA :SOLUTIONS
ES :SOLUTIONS
FIN
PARA PITAENTERO2 :C1 :C2
SI :C2 > 100 [alto]
PITAENTERO1 :C1 :C2
PITAENTERO2 :C1 + 1 :C2 + 1
fin
PARA PITAENTERO1 :C1 :C2
SI :C1 = 100 [alto]
MAKE «HIP POTENCIA (:C1*:C1 + :C2*:C2) 1/2
SI ENTERO? :HIP [MAKE «SOLUTIONS PONPRIMERO (LISTA :C1 :C2 :hip) :SOLUTIONS]
PITAENTERO1 :C1 + 1 :C2
fin
Entre las tríadas pitagóricas hay 2 que cumplen con una singular condición, la superficie es igual al perímetro. Hagamos los procedimientos para que Logo busque iterativamente estas 2 tríadas, teniendo en cuenta que la tríada [A B C] es la misma que [B A C].
PARA TRIANPITA
BT MAKE «SOLUTIONS []
TRIANPITA2 1 1
ES :SOLUTIONS
SUPPERI :SOLUTIONS
FIN
PARA TRIANPITA2 :c1 :c2
ES :c2
SI :c2 > 100 [ALTO]
TRIANPITA1 :c1 :c2
TRIANPITA2 :c1 + 1 :c2 + 1
fin
PARA TRIANPITA1 :c1 :c2
ES fRASE :C1 :C2
SI :c1 = 100 [alto]
MAKE «hip potencia (:c1*:C1 + :c2*:C2) 1/2
MAKE «peripita :c1 + :c2 + :hip
MAKE «suppita :c1 * :c2 / 2
SI :peripita = :suppita [MAKE «SOLUTIONS PONPRIMERO (LISTA :c1 :c2 :hip) :SOLUTIONS ]
TRIANPITA1 :c1 + 1 :c2
fin
PARA SUPPERI :L
SI VACIO? :L [ALTO]
TYPE PRIMERO :L TYPE CAR 32
(TYPE [PERIMETRO=] (ITEM 1 PRIMERO :L) + (ITEM 2 PRIMERO :L) + (ITEM 3 PRIMERO :L))
TYPE CAR 32
(ES [SUPERFICIE =] (ITEM 1 PRIMERO :L) * (ITEM 2 PRIMERO :L) / 2)
ES []
SUPPERI MP :L
FIN
Resultados:
[8 6 10] [12 5 13]
8 6 10 PERIMETRO=24 SUPERFICIE = 24
12 5 13 PERIMETRO=30 SUPERFICIE = 30
PITÁGORAS POR APROXIMACIÓN
Trazar las diagonales de un rectángulo conocidos el alto y el ancho es un problema que necesita trigonometría para calcular el ángulo de la diagonal.
En LOGO una solución es:
para recdiago :a :b
pongrosor 2
repite 2 [av :a gd 90 av :b gd 90]
make «angudiago arctan :b/:a (calcula el ángulo)
make «diago potencia (:a*:a + :b*:b) 1/2 (calcula la diagonal aplicando Pitágoras)
pongrosor 1
gd :angudiago
av :diago
re :diago
gi :angudiago
av :a
gd 180 – :angudiago
av :diago
FIN
RECDIAGO 200 400
El ángulo de la diagonal (la hipotenusa) es una función del alto y el ancho. En el caso de un cuadrado el ángulo es 45° y la diagonal una función del lado. Es posible hacer una determinación empírica aproximada de la diagonal.
PARA CUA :LADO :CO
REPITE 4 [AV :LADO GD 90]
GD 45
AV :LADO * :CO
FIN
Probando con distintos factores (:co) podemos encontrar que la diagonal (o sea la hipotenusa de cualquiera de los 2 triángulos interiores) es aproximadamente 1.41 * :lado. Este valor es la RAIZ de 2 con sólo 2 decimales.
Esto está de acuerdo con el teorema de Pitágoras. En este achivo encontrarás una descripción: la-tortuga-robot-y-el-mundo-geometrico
CUADENTROS. DESAFÍOS Y CREATIVIDAD PITAGÓRICA
Estos son 2 diseños de CUADENTROS creados por alumnos de 1° año. Los CUADENTROS son figuras geométricas diseñadas dentros de un cuadrado y generadas por segmentos ortogonales y diagonales que están en una relación sencilla del lado del cuadrado. 1/2 1/3 1/4 1/6. La relación de la diagonal 1.41 se determina por aproximación.
ROCKET – LUZ
EMBUDO – EMILIANO
PARA ROCKET_LUZ :LADO
BL
REPITE 4 [AV :LADO GD 90]
GD 90
AV :LADO/3
GI 90
AV :LADO/3
GI 90
AV :LADO/6
GI 45
AV :LADO *1.414/6
GD 45
GD 90
AV :LADO/2
GD 135
AV :LADO * 1.414/6
GI 45
AV :LADO/6
GI 90
AV :LADO/2
GD 135
AV :LADO * 1.414/6
GI 90
AV :LADO * 1.414/6
GD 135
AV :LADO/2
GI 90
AV :LADO/6
GI 45
AV :LADO * 1.414/6
GD 135
AV :LADO/2
GD 135
AV :LADO * 1.414/6
GI 45
AV :LADO/6
GI 90
AV :LADO/3
GD 135
AV :LADO * 1.414 / 6
GI 90
AV :LADO * 1.414/6
SL
GD 45
AV :LADO/3
GD 90
AV :LADO/3
GD 90
AV :LADO/6
AV :LADO/3
RELLENA
GD 90
AV :LADO/3
GD 90
AV :LADO/2
GD 90
FIN
PARA EMBUDO :LA
BL
repite 4 [av :la gd 90]
av :la/6
gd 90
av :la/2
gi 90
av :la *2/6
gi 45
av :la *1.414/2
gd 135
av :la
gd 90
av :la * 1/4
gd 90
av :la /4
gd 135
av :la *1.414 /4
gd 135
av :la
gd 90
av :la/2
gd 90
sl
av :la *3/4
rellena
re :la *3/4
gi 90
av :la/2
gd 90
fin
PITÁGORAS 3D
Finalmente apliquemos LOGO para graficar las diagonales de un paralelepípedo.
para parale :a :b :h
pongrosor 2
poncl 0
repite 2 [repite 2 [av :h gd 90 av :a gd 90]
gd 90
av :a gi 90
rightroll 90
repite 2 [av :h gd 90 av :b gd 90]
gd 90
av :b gi 90 rightroll 90]
make «d2d potencia :a*:a + :b*:b 1/2 (calcula la diagonal de la base)
make «angudia2d arctan :b/:a
make «d3d potencia :d2d*:d2d + :h*:h 1/2 (calcula la diagonal espacial del paralelepípedo)
make «angudia3d arctan :h/:d2d
rightroll :angudia2d
gd 90
pongrosor 1 poncl 5
av :d2d
re :d2d
gi :angudia3d
av :d3d
fin
PITÁGORAS Y LA EDUCACIÓN
En la época que vivimos la Educación se ha convertido en una subsidiaria de las TIC. El mercado domina el pensamiento y con sus cantos de sirena empujan una dependencia no solo tecnológica, sino principalmente sicológica. Los fundadores del Logo tenían otra cosmovisión de la tecnología y la educación. Solo era válida la tecnología que nos demandaba esfuerzo y creación, en lugar de la actual valoración de la sustitución y la velocidad. El conocimiento y en particular el matemático está cuestionado y parece prevalecer una concepción utilitaria. Para Pitágoras la matemática regía el mundo, pero no como ciencia de lo útil, sino como organizadora de la mente,como formadora del pensamiento. En su afan místico los pitagóricos crearon normas y preceptos que hoy nos darían risa, pese a todo, no solo el teorema de Pitágoras mantiene actualidad. El genio de Samos nos dejó también pensamientos que iluminan.
Heráclito utiliza esta palabra en su teoría del ser, diciendo: «No a mí, sino habiendo escuchado al logos, es sabio decir junto a él que todo es uno.» Tomando al logos como la gran unidad de la realidad, acaso Lo real, Heráclito pide que la escuchemos, es decir, que esperemos que ella se manifieste sola en lugar de presionar. El ser de Heráclito, entendido como logos, es la Inteligencia que dirige, ordena y da armonía al devenir de los cambios que se producen en la guerra que es la existencia misma.
Así también Logo ha sido para mi un organizador del devenir computacional y tecnológico. Una «inteligencia» que ordena y permite darle un valor y una inserción adecuada a las novedades tecnológicas que en su alocada carrera parecen habernos declarado la «guerra». En el recientemente publicado libro «Atrapados» de Nicholas Carr, el autor nos advierte acerca de los riesgos de una tecnología centrada en la eficiencia, la velocidad y la sustitución de las operaciones mentales. Al mismo tiempo alienta una tecnología centrada en las personas, a la que define como aquella que expande nuestras posibilidades, nuestro pensamiento y nuestra acción. En palabras de los fundadores del LOGO diríamos una tecnología que «desafía» y que da «alas» para la mente. Creo que el libro de Carr es imprescindible para entender lo que está pasando con la tecnología y hacia donde puede llevarnos.
LA IMPRESORA 3D
Durante estos 30 años de docencia he presenciado y actuado y a veces sufrido innumerables cambios tecnológicos. La impresora 3D se incorporó al colegio donde trabajo en forma sorpresiva el año pasado y como siempre obligó a una adaptación, capacitación y experimentación para poder asimilarla a nuestro Logos. Por otra parte su tecnología no me era extraña, pues por un lado era un lugar común en los medios de divulgación y por otro lado la evolución de las impresoras y su tecnología es parte de nuestra planificación desde hace años. Me gusta evocar a Lev Vigotzky, el Mozart de la sicología, quien definía la creatividad como un proceso de reelaboración de conceptos, objetos y sistemas preexistentes. La impresora 3D, al menos en su modelo de «inyección» puede pensarse como la resultante de recombinar la conocida tecnología de impresión por inyección de tinta con la sencilla pistola de barra de siliconas. No voy a extenderme en la descripción de su tecnología y si están interesados pueden linkearse al blog del área de computación en https://bayardcreartedigital.wordpress.com/
La impresión 3D es motivadora, pero su tecnología está en pañales y la velocidad de impresión es lenta. El tiempo de impresión depende del tamaño y la densidad del material de la pieza, pero en nuestra experiencia el tiempo promedio de impresión fue de 2 a 3 hs. por pieza (piezas de 5 x 5 x 5 cm). Pero antes de llegar a esta etapa final, está el proceso de graficación de la pieza que se realiza en alguno de los softwares de diseño 3D. En el ejemplo de abajo, vemos la pantalla del programa Rhinoceros, dividida en 4 vistas, XY, XZ, YZ y la perspectiva. Se trata de una aplicación de nivel profesional, que además requiere una maduración perceptiva ya que no es sencillo interpretar las vistas que son abstracciones. Tampoco es sencillo crear una imagen mental en 3D y luego volcarla a la pantalla, aunque la manipulación de objetos es posible mediante numerosos (casi infinitos) automatismos como las operaciones booleanas. Rhinoceros permite además de la comunicación visual, utilizar comandos con parámetros y ésto lo asemeja al LOGO. El archivo generado es leído por el software de impresión, que permite fijar los parámetros de escala, orientación, calidad de impresión y finalmente guardar la información en un archivo llamado CódigoG, que es el que lee la impresora.
Vistas de una pieza generada en Rhinoceros
Como siempre, la automatización impide realizar aprendizajes sobre las formas que se generan. Entonces alumnos que no tienen idea de cómo definir un polígono pueden manipular por tanteo objetos 3D. Claro que será difícil que el LOGO 3D pueda competir con estas herramientas, pero en mi experiencia la programación 3D desarrolla la percepción y el pensamiento 3D y facilita la comprensión de las operaciones. Por ejemplo una de las herramientas automatizadas de Rhino es la de «generación de sólidos de revolución», tema sobre el cual he publicado en este mismo blog en LOGO Y LA TORTUGA 3D. Pese a todo sería interesante saber como podría generarse el Código G a partir de una forma generada en LOGO3D.
Formas 3D generada por la tortuga tridimensional en FMS LOGO
CONSTRUCCIÓN DE UN MODELO MECCANO
No exagero si afirmo que se una vez más cumplió la máxima: «Conoce el Logo y luego podrás hacer lo que quieras», parafrasis de «ama y luego haz lo que quieras» de San Agustín.
En este caso particular además, la aproximación a la herramienta como objeto de estudio y de análisis tecnológico estuvo facilitada por la experiencia en robótica. El modelo de impresora adquirido resultó «transparente» y «abierto» a la comprensión de los alumnos por 2 motivos: a) Es un modelo donde casi todos los sistemas electromecánicos están a la vista. b) Muchos de los elementos fueron familiares para los alumnos por experiencias de años anteriores: Motores paso a paso, transmisión por correa, sistema de desplazamiento por tornillo y por correa, sensores de posicionamiento y programación de los mismos.
Introduje el tema de la impresión 3D y el diseño en Rhino en 5° año, donde la planificación es más elástica y el nivel cognitivo de los alumnos es el adecuado para el manejo del software y de la impresora misma. La experiencia fue muy positiva y los alumnos hicieron un excelente trabajo apropiándose de la máquina sin dificultades. No así del Soft que requiere mucho más tiempo de elaboración y objetivos específicos para desarrollarlos.
El cabezal de la impresora se mueve en los 3 ejes merced a motores paso a paso. Además el filamento plástico es empujado por un sistema de engranajes movidos por otro motor paso a paso. En la punta del cabezal una resistencia funde el filamento y deposita una gota que se endurece rápidamente. Gota a gota se rellena una capa, luego asciende en Z y genera la capa superior. Así hasta completar la pieza. Un video institucional muestra el proceso de impresión:
MODELO MECCANO DEL EJE Z
Ante el entusiasmo despertado seleccioné un grupo de alumnos voluntarios para construir un modelo en Meccano que emulase el movimiento del cabezal en el eje Z (arriba y abajo).
La impresora posee un sistema de control que entre otras cosas permite activar los motores en los 3 ejes, expulsar el filamento, calentar la base, modificar parámetros, etc. Todo mediante selección de menúes anidados activados por una perilla y un botón. Los desplazamientos en los 3 ejes son referenciales, es decir están referidos a una posición denominada ORIGEN. De manera que la programación requiere la determinación del punto de origen y la memorización de la posición en que se encuentra.
Modelo Meccano movimiento Eje Z
El motor paso a paso utilizado tiene un paso angular de 3,6°, es decir que 100 pasos son necesarios para girar 1 vuelta. El tornillo tiene además un paso que es la distancia entre 2 puntos iguales de su estría.
Una mariposa roscada del mismo paso con el tornillo se hace pasar por el mismo. Cuando el tornillo gira 1 vuelta, la mariposa se desplaza 1 paso de tornillo hacia Z o -Z según el sentido de la rotación.
En nuestro caso, el tornillo Meccano tiene un paso tan pequeño que el desplazamiento era imperceptible. Por esta razón se construyó un sistema de engranajes que aceleraba la velocidad de rotación del motor en 2 etapas.
Empíricamente se determinó que 100 pasos angulares provocaban un desplazamiento aproximado de 55 mm. Por lo tanto 1 paso angular = 55/100 mm.
PROGRAMACIÓN LOGO DEL SISTEMA
Los comandos de robótica son automatismos realizados en FMS LOGO que facilitan la comunicación con la interfaz. Ya he comentado la mayoría de ellos, pero en el caso de los motores paso a paso hay 2 comandos importantes específicos de los motores PAP.
PAP x (donde x = 1 ó 2) que selecciona la salida de tensión donde se conecta el motor. Por razones complicadas de explicar un motor paso a paso utiliza 2 salidas.
PAPPASOS x que determina la cantidad de pasos que se quiere dar.
Luego los comandos ya conocidos:
E (Encender: Envía voltaje a la salida activa)
A (Apagar: Interrumpe el voltaje en la salida activa)
PONVOLT X (Fija el voltaje de la salida activa entre 1 y 12 volts)
DIR.A y DIR.B son los nombres de las direcciones de rotación. En este caso DIR.A era descender
PROCEDIMIENTOS GENERADOS
PARA ORIGEN
PAP 2
PONVOLT 10
DIR.A
E
ENTRADA 1 (Donde está conectado el sensor de posición) SENSAR(Procedimiento recursivo que sensa el valor de voltaje de la entrada activada)
MAKE «MIPOS 0 (Define la memoria MIPOS con valor 0 pues está en el ORIGEN)
FIN
Un sensor es un dispositivo que modifica el voltaje de la entrada de acuerdo a un cambio. El sensor de posición es básicamente un interruptor, tiene 2 estados: Abierto o cerrado. Cuando está abierto el voltaje es 0 (cero) cuando se cierra es 5 Volts (aproximadamente).
PARA SENSAR
SI VOLTAJE > 4,5 [A SOUND ALTO] (Cuando se cierra el switch Apaga el motor y hace un sonido)
SENSAR
FIN
PARA SOUND
PLAYWAVE «DING 0
FIN
Mucho más complejo y esforzado para los alumnos fue la programación del programa MM que le indica al brazo a qué posición referencial debe ir.
PARA MM :X
SI :X < 0 [ES [VALOR NO PERMITIDO] ALTO]
SI :X > 100 [ES [VALOR EXCEDIDO] ALTO]
SI :X = :MIPOS [ES [Ya estoy en esa posición] ALTO] (Estos 3 condicionales validan la entrada)
MAKE «milimetros :X – :MIPOS (Almacena el cálculo de cuántos mm tiene que desplazarse respecto de dónde está)
MAKE «pasos :milimetros *100/5.5 (Calcula la cantidad de pasos que debe dar el motor para que la rosca se desplace los mm calculados)
PAP 2
PONVOLT 10
SI :milimetros > 0 [DIR.B] (Si mm es positivo tienen que subir)
SI :milimetros < 0 [DIR.A] (Si mm es negativo tienen que bajar)
PAPPASOS ABS :pasos (Indicación de cuántos pasos tiene que dar)
E (Encender, con esto comienza a girar los pasos)
MAKE «mipos 😡 (Define la nueva posición)
(ES [Estoy en] :mipos)
FIN
PRODUCCIÓN, EXPERIENCIA Y CONTROL
No sé que deparará el futuro de la educación, ni qué roles cumplirá la tecnología en ella. Ni siquiera puedo proyectar lo que pasará en mi colegio, después de todo en un par de años mi carrera docente habrá terminado. Me gusta pensar que como tantas otras cosas engullidas por el devenir del tiempo las impresoras pasarán, pero el Logos permanecerá. No soy optimista, pero esta experiencia que en definitiva duró 6 clases y algo más para la preparación de la muestra CREARTEC 2014 me regocijó al ver a los alumnos comprender y dominar lo nuevo montándose en sus conocimientos previos.
La impresora 3D está de moda y se promueve a diario como una herramienta de producción (Mano protésis), pero para el Logos es otra cosa. Dice Nicholas Carr en el final de su estupendo libro: Al reclamar nuestras herramientas como parte de nosotros, como instrumentos de experiencia en lugar de meros medios de producción, podemos disfrutar la libertad que ofrece la tecnología grata cuando nos expande el mundo. Es la libertad que, imagino, debieron de sentir Lawrence Sperry y Emil Cachin aquel luminoso día de primavera en París, hace cien años, tras subirse a las alas de su biplano Curtiss C-2 equilibrado por un giroscopio y, desbordados de terror y alegría, pasaron por encima de la tribuna y vieron debajo de ellos, los rostros de la gente mirando el cielo asombrados.
Otra vez la imagen de las «alas» para la «mente». Y por cierto que no mirando el cielo, sino la mesa de la presentación, los padres, docentes y alumnos, observaron asombrados a los alumnos que se apropiaron de esta tecnología y la convirtieron en una herramienta de experimentación y creación personal.
Me ha alegrado muchísimo saber a través de un miembro de la lista LOGO, Ana Isabel Sacristán, sobre la realización de las Conferencias «Construccionism and creativity» cuya página puede visitarse en http://constructionism2014.ifs.tuwien.ac.at/.
Mi alegría fue causada porque a pesar de la marea TICnocéntrica, eminentemente instruccionista y enciclopedista y por lo tanto incapaz de entender o empezar a entender el proceso de aprendizaje para procurar la mejora de la calidad educativa, a pesar de las malas señales que emanan de los centros de poder, respecto a la educación y al rol de la tecnología, las ideas del genio de Seymour Papert siguen apelando a la conciencia de los educadores y justificando esfuerzos cotidianos o especiales como el encuentro de Viena.
Además mi alegría fue potenciada porque al mismo tiempo que leía las noticias de Ana Sacristán yo estaba escribiendo un post sobre la Historia de la Robótica Educativa en el colegio Bayard, donde trabajo hace muchos años y donde nos iniciamos en la filosofía y en el FiloLogo en 1982. Pero en 1988 comenzaba la implementación de la Robótica Educativa, inspirada también en el modelo Lego Logo desarrollado en el MIT. Para introducir el tema y no irme por las ramas con detalles técnicos, recuperé parte de un prólogo del libro «Construccionist Learning», publicado por el MIT en 1990, escrito por Papert. Este artículo fue pubicado en el boletín de la Asociación Amigos del Logo, en septiembre de 1992, y es un extracto del prólogo traducido por el Ing. Daniel Zappalá quien integraba entonces la Comisión Directiva y con quien compartimos varios años de trabajo.
Esa coincidencia de tiempos y valores, me dio ánimo y aliento. Mi carrera docente está llegando a su fin y es desalentador tener que escuchar una y otra vez mediocres conferencias y exposiciones que parecen salidas del Siglo XVIII, inútilmente recubiertas con un lenguaje confuso donde se mezclan como en un cambalache «plataformas virtuales», «conectividad irrestricta», «nube de información», con el cual intentar maquillar su enciclopedismo e instruccionismo más rancio.
Es, en cambio, un placer leer a Papert. El habla de Educación, en una forma audaz aun para esta década. No se basa en información técnica o teórica o en sistemas de administración. Define el conflicto en términos de valores humanos que están en juego. Pero también de eficiencia. El camino que está tomando la tecnología informática en la escuela es ante todo «ineficiente» en términos de mejora educativa.
El párrafo final de su prólogo lo plantea explícitamente: «Han existido discusiones interminables sobre la definición y clasificación de las formas en que las computadoras se usan en la educación: como herramientas, como tutores, como máquinas programables, como motores matemáticos… Desde mi punto de vista, solamente existe un tema: ¿se usarán para hacer de la educación algo aún más técnico o, paradójicamente, menos técnico y más humano?»
CONSTRUCTIVISMO Y CONSTRUCCIONISMO
Por Seymour Papert
… Pensar mediante la observación de lo que uno realiza puede ser una metodología de investigación. En física, si desea verificar una idea, se monta un experimento para poder confirmarla. El resultado del experimento puede llevar a modificar la idea, pero el proceso de montar el experimento no cambia la hipótesis. Algunas actividades en educación son como los experimentos de física en este aspecto, perdiendo algo potencialmente rico si se encara la actividad con un espíritu diferente.
Típicamente, un proyecto comienza con una idea general. Por ejemplo: “Los niños podrían aprender sobre las fracciones diseñando software educativo, en lugar de los que ya vienen preparados”. (Idit Harel, 1990). Llevar esta idea a la práctica puede transformarse en un proceso creativo donde la idea inicial se elabora en una especie de “fábrica” de actividades, formas de hablar, de relacionarse, de jugar y muchas más características que no podrían mencionarse en ninguna lista.
Veo a este proceso, lejano al montaje de un experimento de física y más cerca del trabajo de varios meses de un pintor en una serie de telas. El artista también puede haber comenzado una idea general desde donde el trabajo se iniciaría, pero el resultado final es infinitamente mucho más que la idea original.
El proyecto educacional (y aun el trabajo del artista), ciertamente podría “verificar” una conjetura. Pero insisto en ver el proyecto en algo más que un experimento para confirmar o no una hipótesis: es una cosa de mayor riqueza que una hipótesis abstracta. Y una prueba de esto es que uno puede ver una proyecto de muchas maneras distintas y usarlo para explorar muchas ideas que no estaban presentes en el momento del diseño original.
Un proyecto puede parecerse más a una porción de vida que a un experimento tradicional de física.
HABLANDO DE CONSTRUCCIONISMO…
El término “construccionismo”, incluye, pero va más allá de lo que Piaget llamaría “constructivismo”. Esta última palabra expresa la teoría de que el conocimiento lo construye el sujeto que aprende, no lo provee el maestro. La palabra “construccionismo” expresa la idea adicional de que esto sucede especialmente cuando el sujeto se “engancha” en la construcción de algo externo, o en algo que sea compatible… un castillo de arena, una máquina, un programa de computadora, un libro. Esto nos lleva a un modelo que usa un ciclo de internalización de lo que está afuera, luego una externalización de lo que está adentro y vuelve a empezar.
Quisiera formular un tema teórico referido a “construccionismo vs. instruccionismo”. Esto no sugiere que la instrucción es mala o no sirve. No es mala pero es sobreestimada como el foco para un cambio significativo en la educación.
“Un mejor aprendizaje no saldrá de encontrar mejores maneras de instruir para las maestras, sino en darle al que aprende mejores oportunidades para construir”.
Y esta convicción ha guiado nuestra continua búsqueda de nuevos materiales de construcción o usos nuevos de materiales viejos.
El gran éxito de LOGO ha surgido por ser, originalmente, un kit de construcciones para gráficos computacionales. Otra de las “viejas favoritas” fue la tortuga mecánica, eclipsada por la tortuga en la pantalla cuando las computadoras con capacidad grafica entraron en las escuelas. En los últimos años hemos tenido mucho éxito con una generalización de la idea de la Tortuga de piso, en la forma de kits de construcciones para dispositivos mecánicos controlados por computadora de los cuales Lego-Logo es el mejor conocido. La programación en sí misma se puede pensar como construcción de cosas, llamadas programas…
PENSAMIENTO CONCRETO Y PENSAMIENTO FORMAL
En este tiempo en que los sistemas políticos y económicos monolíticos centralizados, jerárquicos y autoritarios parecen caer, me resulta más que nunca intrigante, especular sobre la relación entre las estructuras políticas y cognitivas. ¿Es una coincidencia que haya también una gran desilusión con los abordajes monolíticos, dirigistas y jerárquicos sobre inteligencia artificial y el modelo de la mente? Es tentador argumentar que una planificación central falló en producir máquinas inteligentes por la misma razón que falló en producir una economía inteligente.
También es interesante especular que la “coincidencia” es ideológica, antes que el reconocimiento de situaciones paralelas análogas para tal fracaso.
Pero lo que ciertamente existe, es una reacción contra el “status” privilegiado de modelos de pensamiento que evocan tales descripciones como: dirigidos por reglas, jerárquicos, planificados, lógicos, formales.
Observando la escena cognitiva contemporánea, notamos numerosos movimientos paralelos que no siempre parecen estar al tanto unos de otros, o preparados para aceptar una identidad común. Sherry Turkle y yo argumentamos en un memo, que estos movimientos forman parte de una tendencia que revaloriza los componentes concretos del pensamiento con respecto a los formales. No vemos esto como una negación de la importancia del pensamiento formal, sino simplemente remover el sobrevaluado status que se le ha dado a los valores cognitivos en la tradición occidental.
Piaget suscribe firmemente a estas ideas en sus puntos de vista sobre la relación entre el pensamiento concreto y formal. Nuestra diferencia con Piaget en este tema, puede resumirse aforísticamente diciendo: “La lógica debe estar en el piso, no en la cima” (Logic should be on tap, not on top).
Haciendo una breve simplificación, actualmente pienso que las dos correcciones mas sobresalientes que pueden hacerse a la epistemología de Piaget están relacionadas con su supervaloración de lo lógico, lo formal y las proposiciones formales del pensamiento.
Su contribución más importante es el reconocimiento de la importancia de lo que él llama pensamiento concreto. Su mayor debilidad es su resistencia a abandonar el sistema de valores que coloca la pensamiento formal “en la cima”. Esta resistencia, lo lleva a ver el pensamiento concreto como el pensamiento de los niños, y no le permite apreciar su descubrimiento de “lo concreto” como una forma universal de razonamiento humano.
La primera corrección puede situarse en el reconocimiento que “lo formal” no es una etapa sino un estilo de pensamiento.
En “Desafío a la Mente”, presento a la tortuga como un “objeto con el cual pensar” y argumento que al ir conociendo este objeto, se produce una considerable adquisición de conocimientos geométricos de una forma similar a cuando uno va conociendo a una persona en lugar de insertar proposiciones en una estructura interna de datos. Sería el último en negar la importancia en geometría de las pruebas formales de proposiciones correctas; y para la gente que piensa fácilmente en estos términos, ellas pueden proveer el mejor camino hacia el conocimiento de la geometría.
Pero para la gente que no maneja estos términos, que incluye a la mayoría de la víctima de la matemática escolar, lo que se necesita no son mejores o más claras explicaciones formales.
Lo que se necesita esta en el dominio de lo concreto. Pero requiere – y esta es mi segunda corrección a Piaget – una conceptualización de lo concreto que baje mas a tierra con respecto a la de Piaget, dándole a los objetos un rol central.
PRODUCTIVIDAD, EFICIENCIA, CONSTRUCCIONISMO Y DEMOCRACIA
Rechazo la neutra búsqueda científica para lograr la más alta “productividad” o “eficiencia” en la escuela. Si la ciencia ofreciera la elección entre métodos educativos que permitirían alcanzar altos resultados en conocimiento científico, y métodos que permitirían desarrollar la honestidad, el honor, el respeto y otros valores humanos (acerca de los que todos, de alguna manera, estamos comprometidos), elegiríamos los valores sobre la eficiencia.
Sin embargo, no creo que exista tal elección.
Por lo contrario, creo que los valores democráticos y personales son sinergéticos con el desarrollo del intelecto. Para hacer una ilustración simple, vemos en el construccionismo la oportunidad para un mejor aprendizaje y para un ambiente de aprendizaje más democrático con un mayor respeto por las formas individuales de hacer las cosas.
Vemos la debilidad de la clase tradicional, porque está relacionada a su estructura autoritaria y porque favorece la deshonestidad intelectual inherente a la solicitud de que todos deben dar lo que el libro dice, y lo que la maestra aparenta saber, como la respuesta correcta.
PERESTROIKA(1) EN LA EDUCACIÓN
Una perspectiva instruccionista tiende a ver el mejoramiento de la educación como un problema “científico”: descubrir los mejores medios para la instrucción; si esto incluye “maestros humanos”, instruirlos para que realicen una serie de procedimientos apropiados. Por supuesto, cualquiera que haya trabajado en escuelas reales y con maestros reales sabe que aún reemplazar una forma de instrucción por otra no siempre es fácil.
Pero la tarea es mucho más seria si la raíz del problema es justamente el instruccionismo. El instruccionismo ve a la educación como un acto técnico el llevar a cabo procedimientos instruidos por el maestro. Terminar con el instruccionismo implica una perestroika similar a la iniciada por Gorbachoff, pero en una escala más restringida. La pregunta es si los individuos, los niños y los adultos comprometidos en ayudarlos a crecer, pueden tomar sus propias decisiones, o si son parte de un gran mecanismo.
Han existido discusiones interminables sobre la definición y clasificación de las formas en que las computadoras se usan en la educación: como herramientas, como tutores, como máquinas programables, como motores matemáticos… Desde mi punto de vista, solamente existe un tema: ¿se usarán para hacer de la educación algo aún más técnico o, paradójicamente, menos técnico y más humano?
(1) Movimiento de flexibilización del régimen soviético iniciado por el Michel Gorbachov.
Creo que a Seymour le hubiese gustado este proyecto. El proceso completo era controlado por varios procedimientos Logo realizados en WINLOGO, la primer versión Logo para Windows que tuvimos.
La Inteligencia Artificial es una disciplina que intenta crear máquinas que actúen inteligentemente frente a una situación. La palabra inteligencia es difícil de definir pero si partimos de su etimología “Inter Elegere” (Elegir entre) podríamos definirla como la capacidad de «elegir» acertadamente la mejor opción frente a un problema.
El problema que se le ha presentado a la IA es cuando el rango de respuestas posibles es muy alto o infinito. La IA básicamente es un conjunto de programas computacionales que contienen información y reglas de actuación. Cuanto mayor sea el rango de posibilidades mayor es la cantidad de reglas necesarias a definir.
Sistema inteligente
La expresión «sistema inteligente» se usa a veces para sistemas inteligentes incompletos, por ejemplo para una «casa inteligente» o un «sistema experto». En este caso “incompleto” significa que la “inteligencia” del programa se aplica a un universo restringido de conocimientos. Un «sistema experto» muy conocido son los programas que juegan ajedrez. El éxito de estos programas que han llegado a derrotar a los grandes maestros, está basado en fuerza bruta: enorme cantidad de bits de información y velocidad de procesamiento. Sin embargo con toda su complejidad estos programas no pueden jugar a otra cosa, ni siquiera al TATETI. La inteligencia humana en cambio puede lidiar con una enorme diversidad de asuntos y con problemas de diferente nivel de complejidad. Podemos aprender cientos de juegos.
Reglas de actuación
Una regla de actuación es el resultado de una experiencia o el resultado de interpretar la propia memoria. Relaciona situación y consecuencias de la acción. Las reglas se expresan en líneas de programación encabezadas por el condicional SI (IF). La sintaxis de estas líneas es SI (Comparación) [Reacción verdadera] [Reacción falsa].
PARA TURNO1
es [Buena suerte, que gane el mejor…]
haz «permitidas [a1 a2 a3 b1 b2 b3 c1 c2 c3]
haz «primer ll
Si :primer = [a1] [jugadaa1 circb2 es [CIRCULO en b2] espera 50 turno2a1 stop]
Si :primer = [a2] [jugadaa2 circb2 es [CIRCULO en b2] espera 50 turno2a2 stop]
Si :primer = [a3] [jugadaa3 circb2 es [CIRCULO en b2] espera 50 turno2a3 stop]
Si :primer = [b1] [jugadab1 circb2 es [CIRCULO en b2] espera 50 turno2b1 stop]
Si :primer = [b2] [jugadab2 circa1 es [CIRCULO en a1] espera 50 turno2b2 stop]
Si :primer = [b3] [jugadab3 circb2 es [CIRCULO en b2] espera 50 turno2b3 stop]
Si :primer = [c1] [jugadac1 circb2 es [CIRCULO en b2] espera 50 turno2c1 stop]
Si :primer = [c2] [jugadac2 circb2 es [CIRCULO en b2] espera 50 turno2c2 stop]
Si :primer = [c3] [jugadac3 circb2 es [CIRCULO en b2] espera 50 turno2c3 stop]
Si NO MIEMBRO? :primer [[a1] [a2] [a3] [b1] [b2] [b3] [c1] [c2] [c3]] [es [tu jugada está en offside] turno1]
fin
CONDUCTISMO Y CONSTRUCTIVISMO
En cierta forma la creación de estos sistemas incompletos se parece a una especie de aprendizaje «conductista». Se agregan reglas de actuación, se evalúa su desempeño, si es defectuoso se agregan más reglas. No es un aprendizaje constructivo. Me parece interesante que la búsqueda de un sistema que aprenda constructivamente, es decir generar un conocimiento nuevo o de mayor complejidad a partir del conocimiento previo, impulsó al Dr. Seymour Papert a estudiar con Piaget durante 5 años. Es que Piaget con su epistemología genética había descripto cómo se genera (génesis) el conocimiento, cómo se complejizan los esquemas corporales y mentales a partir de esquemas previos más simples. El aprendizaje piageteano tiene una «aroma» a programación que seguramente habrá sido irresistible para los creadores del Logo. Los puntos en común con la teoría societaria de la mente del Dr. Marvin Minsky, publicada en 1985, son el resultado de esa convergencia. Obsérvese que es la característica de toda programación en Logo, se crean procedimientos más complejos a partir de «primitivas» elementales.
El primer juego que Bill Gates programó fue un TATETI, aunque no sé a que edad. Comparado con el ajedrez no parece gran cosa, seguramente el juego nos parecerá aburrido ya que ganar es mposible si el adversario no comete un error.
El TATETI es un juego que tiene un rango de posibilidades relativamente bajo. Al inicio del juego hay 9, luego 8, 7, 6,… Factorial de 9 posiciones posibles (362880). Pero claro muchas de estas posiciones son “inaceptables” porque llevan a la derrota, con lo cual el número de bifurcaciones posibles se achica considerablemente. Pero para ello hay que introducir en el sistema cuáles son las jugadas «aceptables» o sea ganadoras.
Como sea es un notable esfuerzo de programación crear un programa que juegue al TATETI contra un usuario y nunca pierda. Es como crear a uno de esos insoportables que o la ganan o la empatan.
Esta programación que presento es el trabajo “creativo” de Juan Cruz, alumno egresado 2012 del colegio Bayard. Fue ese año, cuando el colegio conmemoraba 30 años de computadoras en educación que le sugerí embarcarse en el desafío. Cada tanto surge un alumno maestro de la programación con una gran motivación interna. Juan Cruz, con unas mínimas instrucciones, perseveró todo el año trabajando en su casa para completar el juego y presentarlo en la muestra de fin de año. Utilizó FMS LOGO que es la versión que utilizamos en robótica.
Fue un logro que tuvo el reconocimiento principalmente de muchos alumnos que ingresaban al editor y podían «ver» el complejo y extenso trabajo de programación. Es que en programación lo «esencial es invisible a los ojos».
Adjunto un documento PDF con los procedimientos y comentario y un archivo DOC con los procedimientos (no puede insertar un archivo LOGO), por lo que podrán copiar los archivos y pegarlos en el editor del FMS LOGO.
Hay 2 programas principales: DALE y REVANCHA
En DALE comienza actuando el usuario. En REVANCHA comienza la computadora. Es divertido también preceder a estos procedimientos el comando PERSPECTIVA.
ARCHIVO DOC PARA COPIAR PROCEDIMIENTOS Y PEGAR EN EL EDITOR FMS LOGO: TATETI PROCEDIMIENTOS FMS LOGO Para ingresar la posición tipea la columna y luego la fila: A1 B2 C3
He publicado varios artículos sobre las bondades de Micromundos EX, un desarrollo de la empresa LCSI, fundada por Papert. Algo que me gusta de LCSI es que entrás a su sitio http://www.micromundos.com/ y el encabezado te informa que son «líderes en tecnología educativa constructivista». Más allá de lo que ser constructivista significa, esta gente se define primero con un enfoque cognitivo y pedagógico. En el entorno actual de las tecnologías asociadas a la educación, ésto ya es un gran mérito.
LCSI
LCSI desarrolló varios softwares con esta base pedagógica, algunos para los más chicos como «El Castillo de Fantasía» y «La Isla de Fantasía», son fantásticas precuelas de su principal producto el Micromundos EX (MMEX desde ahora).
MMEX es un Universo de mundos integrados que permiten explorar y construir con «materiales» digitales. Hay un «mundo» gráfico que dispone de una serie de herramientas de dibujo y pintura, un «mundo» musical que permite crear melodías y explorar los parámetros musicales, un entorno de programación Logo (muy potente) al que se accede con la forma tradicional (editor Logo) o con una forma más visual (editor en pantalla), un entorno de animación de tortugas y creación de figuras, un entorno de importación de archivos multimedia. Todos estos «mundos» pueden integrarse. Con las herramientas gráficas puedo crear formas, copiarlas como figuras de tortuga, animarlas mediante programación y musicalizar con mis propias melodías la animación, escribir una historia y hasta puedo hacer que las figuras «hablen».
LA MOCHILA – UNA IDEA GENIAL
Una idea genial de LCSI es la «mochila» que cada tortuga posee. Cualquiera puede entender qué es una mochila. Un contenedor de anotaciones, libros con información, o con reglas de actuación, documentos de identificación y ubicación, formas y figuras. La mochila es en realidad un conjunto de cuadros de diálogo que se abren clickeando con el botón derecho sobre una tortuga.
ESTADO: DNI Y GPS
Al abrir la mochila nos encontramos con 5 etiquetas: La de estado, donde encontramos los datos de identidad de la tortuga, la ubicación y orientación, su tamaño, su figura y el estado de la pluma. Esta etiqueta introdujo anticipadamente el conceptos de GPS. No solo me informa sino que puedo modificar las propiedades desde el cuadro de diálogo.
REGLAS DE ACTUACIÓN
La etiqueta de REGLAS fue y es revolucionaria. Permite programar «reglas» para reaccionar ante ciertos eventos. El concepto de reglas de actuación proviene de la programación de sistemas inteligentes, donde las reglas son condicionales que le permiten al sistema elegir «inteligentemente» qué hacer frente a una situación (si sube la temperatura sobre cierto valor entonces encender el aire). Inteligencia = Inter elegere (elegir entre).
Las reglas tienen
a) Un evento que indica cuándo se debe ejecutar la misma
b) La acción o procedimiento que debe ejecutarse ante el evento.
REGLAS DE MMEX
DESCRIPCIÓN
AlClic
Cuando se clickea sobre la tortuga se ejecuta la regla 1 vez o por siempre
AlColor
Cuando la tortuga toca el color seleccionado (aparece marcado con un punto negro). En la lista de colores aparecen todos los que están en la pantalla. Se pueden programar todos colores con reglas diferentes.
AlaSeñal
Después del intervalo de tiempo indicado se ejecuta la regla.
AlTocar
Cuando 2 tortugas se tocan.
AlMensaje
Una tortuga puede enviar un mensaje a las otras activas mediante el mando mensajepara
Reglas en la mochila
En la figura vemos programadas las siguientes reglas:
Cuándo
Entonces
Ejecutar
Al clic
«
Por siempre AD 15 ESPERA 1
Al tocar el color verde
«
REBOTE
Al tocar (otra tortuga)
«
CHOQUE
PROCEDIMIENTOS EN LA MOCHILA
Otra etiqueta muy importante es la de Procedimientos, donde puedo escribir procedimientos «locales» que solo serán entendidos y ejecutados por la tortuga dueña de la mochila.
En estos 2 ejemplos vemos los procedimientos «locales» de 2 tortugas. Como se observa éstos pueden tener el mismo nombre.
Tortuga t5
Tortuga t8
Para rebote
At 20
De 100 + azar 100
Dime “yee
FinPara choque
At 1
De 90
Fcolor azar 100
fin
Para rebote
At 20
De 100 + azar 100
Dime “you
FinPara choque
At 1
De 90
Fcolor azar 100
Fin
El comando DIME sintetiza en voz su argumento, es decir la tortuga «habla». El comando DIME utiliza la función «texto a voz» provista por el sistema operativo. En general hay 1 solo tipo de voz instalado, pero pueden instalarse varios tipos. MW permite cambiar «la voz» mediante el comando DIMECOMO «TEXTO «TIPODEVOZ
Por ejemplo: Dime «hello «Sam o Dime «Hello «Anna, donde Sam y Anna son 2 tipos de voz diferentes.
TORTUGAS INDEPENDIENTES
Las mochilas permiten crear múltitud de tortugas con sus propias reglas de actuación que se desplazan por la pantalla en forma independiente de un programa de control global. Al mismo tiempo que interactúan con el entorno, pueden interactuar entre ellas, incluso enviarse mensajes u órdenes. Esta independencia es «aparente» porque como veremos más adelante, Logo controla una por una las tortugas activadas. Veamos un ejemplo de tortugas encerradas en un recipiente desplazándose en forma azarosa gracias al comando DE 100 + AZAR 100 (valor mínimo del giro es 100 y el máximo 200).
DE LA MOCHILA AL LADRILLO INTELIGENTE
Las tortugas autónomas anticiparon el «ladrillo inteligente Lego». Este es el equivalente a la mochila, porque tiene un «procesador» donde se pueden grabar los procedimientos. De esta forma el robot porta su propia «mochila» o «cerebro» sin necesidad de una conexión con la computadora. Pequeños robots autónomos pero capaces de comunicarse entre sí para realizar tareas colaborativas parece ser la estrategia para construir habitats en planetas remotos. En el siguiente video vemos una comunidad de pequeños robots independientes que tienen cierta similitud con mi humilde «caja de tortugas virtuales».
EARLY DAYS: FÍSICA CON LOGO
Those early days, es una bella y nostalgiosa canción de Paul MacCartney. Apropiada para los recuerdos de «nuestros early days». Vemos con el cerebro, no con los ojos. Es nuestra mente quien da significados a los inputs informativos. Cuando allá en «those early days» hice mi primer curso Logo, con aquella inolvidable versión para TI 99, quedé maravillado. Yo no veía una tortuga, sino un vector. Había estudiado cálculo vectorial en la facultad, un tema árido como pocos y de pronto tenía frente a mí un vector que se movía acorde a mis comandos. Cada figura dibujada la interpretaba como uina composición vectorial. Apenas nos informaron como se hacía un cuadrado con el comando REPITE, me di cuenta como se hacía un círculo y al hace el círculo (en esa época la tortuga era «una tortuga» se desplazaba con la suficiente lentitud como para seguirla) yo veía un diferencial que se modificaba con el tiempo (dx/dt).
La tortuga me ha parecido un invento genial e irremplazable, digna de un Nobel de Educación. Entendí enseguida el propósito de Papert de crear puentes entre el pensamiento corriente, o conceptos elementales con otros complejos. No es de extrañar que la tortuga sea también un puente con el mundo de la física. Se han publicado libros enteros con proyectos de notable originalidad y profundidad.
Mirando a las tortugas rebotar contra las «paredes virtuales» de la caja azul, pensé que podían asimilarse a las moléculas puntuales de un gas, con choques perfectamente elásticos. Esa es la definición de un gas ideal. Decidí investigar si la «jaula» de las tortugas podía asimilarse a un recipiente lleno de un gas ideal y si se cumplirían las leyes de Gay Lussac.
LA LEYES DE LOS GASES IDEALES
La teoría cinética de los gases, afirma que la presión de un gas es el resultado de la sumatoria de los impactos de las moléculas del gas contra las paredes del recipiente. La presión es entonces proporcional a la cantidad de impactos y ésta depende de:
a) La cantidad de moléculas encerradas. A mayor cantidad de moléculas habrá más impactos contra la pared y por lo tanto aumentará la presión. (Relación directa)
b) La temperatura del gas. La temperatura exitará a las moléculas aumentando su velocidad y por lo tanto su energía cinética (Ec=1/2.m.v2) y su cantidad de movimiento (P=m.v). La presión aumentará con la temperatura. (Relación directa)
c) El volumen de la caja. A menor volumen, el recorrido necesario para impactar la pared sería menor y aumentará la presión. (Relación inversa)
La ley general para los gases ideales es: P.V =k. N. T
P= Presión
V= Volumen
k = Constante de proporcionalidad, denominada de Boltzman.
N = Cantidad de partículas.
T = Temperatura
Si V y T son constantes, la ecuación se reduce a P=k.N o P1/N1 = P2/N2 = … =Pn/Nn = k, es decir una relación lineal directa.
REGLAS Y PROCEDIMIENTOS: P = f(N)
Cuándo
Entonces
Ejecutar
Al clic
Por siempre AVA
Al tocar el color verde
REBOTE
AlaSeñal 10 (cada segundo)
SI CRONOMETRO > 1000[ FINALIZAR]
Eliminé la regla AlTocar para que las tortugas no interactuasen entre ellas como si fuesen partículas puntuales.
AlaSeñal 10, significa que cada segundo ejecuta el control del cronómetro. Este se resetea a 0 al INICIO y al trascurrir 1000 décimas de segundo (100 segundos) detendrá la experiencia. Veamos ahora los procedimientos.
PARA AVA
AD 15
ESPERA 1
FIN
PARA REBOTE
AT 25
DE 150 + azar 100
LANZA [NOTA 60 2]
DA «CHOQUES :CHOQUES + 1 ; incrementa el contador en 1
BT
ES :CHOQUES ; escribe el valor del contador en la caja de texto
FIN
PARA FINALIZAR
ES FRASE [TOTAL COLISIONES=] :CHOQUES
DETÉNTODO
FIN
PARA INICIO; procedimiento del botón INICIO
BM
BT
INICIACRON
BOX; dibuja el recipiente
DILE [t1 ……. tn] ; donde n es el número de tortugas (partículas) presentes en el recipiente.
FCOLOR AZAR 24
ORIGEN
DE ( menosprimero quien ) * 18
AD 50 + AZAR 100
DA «CHOQUES 0; resetea el contador de choques a cero
INICIACRON; resetea el cronómetro
FIN
para box
bt
JUANA, ; llama a una tortuga bautizada Juana, que dibuja el recipiente
limpia
sp
fcolor 106
fpos [-220 -190]
cp
frumbo 0
repite 2 [ad 380 de 90 ad 440 de 90]
sp
fpos [0 100]
pinta
fpos [-300 0]
fcolor 56
pinta
fin
VIDEO SINTÉTICO DE LA EXPERIENCIA
Para cada N de tortugas , la toma de datos de la cantidad de choques se realizó 3 veces, ya que el azar genera una cierta incertidumbre.
FE DE ERRATAS: En el video donde dice 10 segundos debería decir 100 segundos.
El registro de valores es el siguiente:
La curva Presión en función de N resultante es: (la ecuación resultante es producto del Excel).
Como es visible no es una función lineal. Sí lo es aproximadamente entre 2 y 24 tortugas:
Esta anomalía es curiosa. Por un lado coincidiría con la predicción de Gay Lussac, en el sentido de que los gases reales tienden a comportarse como «ideales» a baja presión y alta temperatura. Las tortugas se comportaron entonces como partículas reales que a alta presión no siguen la ley de Gay Lussac. En realidad lo que ha sucedido es que al aumentar el número de partículas, Logo tiene más dificultad para controlarlas y se lentifica la velocidad de las tortugas. Por lo tanto baja el número de impactos y la curva comienza a descender.
Esta experiencia la realicé con el W XP. Al cambiar a W 7 los valores fueron sensiblemante menores, las tortugas se desplazaban más lentamente, como si W7 hubiese bajado la temperatura, o quizás necesite una versión adecuada de MMEX.
En la siguientes entradas desarrollaré más experiencias relacionadas con principios de física.
En primer lugar describiré como experimentar con las tortugas las restantes relaciones de Gay Lussac, P = K. T y P.V = k
Luego describiré trabajos realizados con mis alumnos de 4° año, donde investigamos principios físicos como el intercambio de calor, la fotoelectricidad, la termoelectricidad, el decaimiento del voltaje en pilas, a través de experiencias concretas controladas por computadora en la toma de datos, y su posterior graficación y análisis.
Quizás encuentre otras almas que se maravillen como yo de las posibilidades del Logo para experimentar con fenómenos físicos.
Este proyecto es la conclusión de la unidad Automatización, que básicamente tiene como objetivo la construcción de sistemas electromecánicos programados por la computadora que pueden cumplir sus funciones en forma automática, controlados por un procedimiento de computadora. Esta unidad se trabaja en 1º año, donde la transición del pensamiento concreto al formal se correlaciona con el desarrollo de competencias constructivas con materiales (especialmente Meccano) y el desarrollo de competencias de programación con el lenguaje Logo (FMS en este caso).
Fue presentado en la Feria 2012, celebrando los 30 años de computadoras y educación en el colegio Bayard.
CUARTETO “TIEMPO”
La presentación incluye 4 mecanismos ejemplares, es decir que son ejemplos de mecanismos «tipos» y conceptos que se utilizan para resolver diversos problemas mecánicos. Para la presentación del 2012, tomaron la forma de relojes, en el sentido de que podíamos medir el tiempo en función de los ciclos de cada mecanismo. El ciclo se determinaba mediante sensores de posición que le permitían a la computadora detectar un giro de 360º o 180º.
EL RELOJ ASCENSOR: MECANISMO DE TORNILLO
El tornillo es un transformador de movimiento, ya que la rotación del eje del motor se transforma en un movimiento lineal de una pieza que se desplaza (en este caso sube y baja) a lo largo del tornillo. La pieza fundamental es una manivela roscada acoplada a la base (invisible a los ojos). Al girar el tornillo mediante un sistema polea – motor, la manivela roscada es forzada a desplazarse a lo largo del tornillo, hacia arriba o hacia abajo según la dirección del giro. El tornillo además de un tranformador de movimiento rotativo a lineal es un gran reductor de velocidad. Al girar 1 vuelta la manivela roscada se desplaza 1 paso del tornillo (distancia entre 2 estrías)
Este fue el único de los relojes que necesitaba 2 sensores de posición, uno para el tope superior y otro para el inferior.
Tornillo esquema
Mecanismo de tornillo
Mecanismo de tornillo, vista frente
RELOJ DE CUADRANTE: UN PROGRAMADOR MECÁNICO
Es el más parecido a un reloj, por la aguja central que gira en el centro y los cuadrantes. A las 12, las 3, las 6 y las 9, los alumnos insertaron un interruptor magnético (Reel switch) que se cierra con un pequeño magneto de botón. El Reel de las 6 estaba conectado a la computadora, lo que le permitía sensar la posición y emitir un sonido. Los otros Reels estaban conectados a un circuito como el de las figuras:
La aguja del mecanismo tenía un pequeño magneto y al pasar por el Reel cerraba el circuito y foco se encendía (En el vídeo parece que el foco de las 9 estaba quemado). Se crea un ciclo de encendido y apagado. Este es un programador mecánico, ya que repite una acción de encendidos y apagados siguiendo una misma secuencia. El equivalente programa de computadora en Logo sería:
PARA PROGRAMA
Salida 1
E (encender la salida)
Espera 10
A (apagar la salida)
PROGRAMA
FIN
Reloj Cuadrantes: Programador mecánico
RELOJ EXCÉNTRICO:
Se denomina así pues tiene una pieza articulada a un disco en un punto afuera del centro de rotación. Al girar el disco impulsada por el motor, la pieza (denominada leva) se desplaza alternativamente hacia arriba y hacia abajo (o hacia adelante y atrás). El recorrido de la leva es igual al diámetro del disco medido entre los puntos de articulación.
Desplzamiento vertical de la leva igual al diámetro de la polea.
En el caso de nuestro reloj se acopló al disco una tira cuya función era aumentar el diámetro del giro y por lo tanto el recorrido de la leva.
Diámetro extendido para lograr un mayor desplazamiento.
El otro extremo de la leva se articuló a un canaleta de plástico sobre la cual se deslizaba una bola extraída de uno de los antiguos mouses electromecánicos.
Puede considerarse también un programador mecánico ya que se genera una secuencia repetida.
Reloj excéntrico
RELOJ HELICRÍLICO: TREN DE TRANSMISIÓN
Un tren de transmisión está formado por varias etapas de transmisión polea polea o engranaje o engranaje (son los vagones del tren). Se generan ejes paralelos o perpendiculares con diferentes velocidades. Varillas de acrílico se han acoplado a los ejes para crear un efecto visual más marcado.
Tren de transmisión
SENSADO
En todos los casos, los sensores de posición detectaban el ciclo de 365º, excepto en el mecanismo que detectaba el ciclo: ascenso – descenso. Al completar el ciclo el evento se advertía con un sonido que cada grupo grabó previamente: “Levantate pibe”, “Tic tac”, “Riinnn”, “I O”. Son los que se escuchan en la grabación.
Los sensores estaban conectados a las siguientes entradas:
Reloj cuadrante: Entrada 1
Reloj excéntrico: Entrada 2
Reloj Helicrílico: Entrada 5
Reloj de tornillo: Entradas 3 y 6
SINFONÍA DE LOS RELOJES
Para la presentación de la muestra se integraron los 4 mecanismos en un procedimiento denominado SINFONÍA y que pudimos ver en la parte final del vídeo.
PARA SINFONÍA
SINFONÍA1
SINFONÍA2
FIN
PARA SINFONIA1
SALIDA 1
DIR.A
E
SALIDA 2
DIR.B
PONVOLT 6
E
SALIDA 3
DIR.A
E
SALIDA 4
DIR.A
E SINFOSENSADO1
ES [TERMINÉ, DONE, VACACIONES, FERIADO, ME VOY]
FIN
PARA SINFOSENSADO1
ENTRADA 1
SI TACTO = “VERDADERO [PLAYWAVE «CUCU 1]
ENTRADA 2
SI TACTO = “VERDADERO [PLAYWAVE «TIC 0 PLAYWAVE «TAC 1]
ENTRADA 5
SI TACTO = “VERDADERO [PLAYWAVE «PIBE 1]
ENTRADA 6
SI TACTO = “VERDADERO [PANICO CELEBRARALTO] SINFOSENSADO1
FIN
PARA SINFONIA2
SALIDA 1
DIR.B
E
SALIDA 2
DIR.A
PONVOLT 6
E
SALIDA 3
DIR.B
E
SALIDA 4
DIR.B
E SINFOSENSADO2
ES [TERMINÉ, DONE, VACACIONES, FERIADO, ME VOY]
FIN
PARA SINFOSENSADO2
ENTRADA 1
SI TACTO = “VERDADERO [PLAYWAVE «CUCU 1]
ENTRADA 2
SI TACTO = “VERDADERO [PLAYWAVE «TIC 0 PLAYWAVE «TAC 1]
ENTRADA 5
SI TACTO = “VERDADERO [PLAYWAVE «PIBE 1]
ENTRADA 3
SI TACTO = “VERDADERO [PANICO CELEBRARALTO] SINFOSENSADO1
FIN
El comando PLAYWAVE ejecuta un archivo de sonido de formato WAV. Tiene 2 argumentos: El primero es el nombre del archivo a ejecutar, el segundo es un número entero (0 1 2 4 8 16) que modifica la forma en que se ejecuta el WAV. Si utilizamos el cero, PLAYWAVE «TIC 0 REPITE 10 [AV 100 GD 18], iniciará el archivo de sonido TIC e inmediatamente ejecutará la orden siguiente. Es decir podremos escuchar el sonido simultáneamente con el movimiento de la tortuga en este caso.
Si utilizamos el número 1, PLAYWAVE «TIC 1 REPITE 10 [AV 100 GD 18], se iniciará el archivo de sonido TIC y recién cuando este termine se ejecutará la orden siguiente. No habrá simultaneidad entre el sonido y el movimiento de la tortuga.
Estos son las acciones de los restantes números.
2 No ejecuta el comando si el sonido especificado no puede ser hallado. Previene de un error.
4 No soportado.
8 Continúa repetiendo el archivo de sonido hasta que otra sentencia PLAYWAVE sea ejecutada.
16 No detiene un sonido que se está ejecutando.
Para cortar un archivo de sonido que se está ejecutando el comando es PLAYWAVE [] 0
30ºANIVERSARIO DEL PRIMER CONGRESO INTERNACIONAL LOGO
«COMPUTADORAS EN EDUCACIÓN Y CULTURA»
Dentro del proceso electoral que aquí en Argentina vivimos estos meses, todos los partidos políticos recordaron y aplaudieron el proceso democrático que se inició en 1983 y que con éxitos y fracasos hemos sabido mantener. Otro hecho acaecido en 1983 pasó desapercibido en la vorágine que diariamente nos sumergimos tanto a nivel país como institucional. Solo aquellos que lo vivimos de alguna manera y usufructuamos sus lecciones y las atesoramos todos estos años, actualizándolas y recreándolas, lo recordamos con cierta intensidad y porqué no, nostalgia. Los años van mellando la exactitud de las vivencias y quedan imágenes generalmente idealizadas. Me refiero al Primer Congreso Internacional Logo que se realizó en el Colegio Bayard, los días 16, 17 y 18 de septiembre de 1983.
Apertura del Congreso, de izquierda a derecha: Ing. Horacio C. Reggini, Prof. Annelise de Forteza, Ing. Hilario Fernández Long, Dr. Julián Marcelo (?), Dr. Antonio Battro
Algunos hechos de ese evento se entrelazan con la actualidad. En estos días, a escasos metros del mismo colegio , en la Plaza Alemania se erigió el “Ágora de la Paz”, obra de la artista Marta Minujin. En la Agenda cultura on line del gobierno de la ciudad se la describe con estas palabras: “Inspirado en el templo de Hefesto, lugar en el que se reunían los griegos en el siglo V a. C. para discutir sobre la democracia, la instalación tiene 13 x 26 metros y 32 columnas, varias de ellas instaladas torcidas, siguiendo la filosofía de la diagonalidad donde todo cambia de acuerdo al punto de vista desde donde se mira. El templo está recubierto por libros editados por la artista que contienen frases célebres sobre la Paz, la Amistad y la Libertad”. La obra es entre otras cosas un homenaje a la restauración de la democracia en 1983, Estas coincidencias no son casuales, ya que gran parte del éxito que el Congreso tuvo se debió a la avidez de nuevas ideas, de nuevos horizontes humanistas para la educación, de una ansia de reconstruir una Nación en base al humanismo, el respeto y la libertad. El Congreso fue la consecuencia de un movimiento que se estaba gestando en el país desde 1981 y que algunos colegios pioneros como el Bayard, llevaron a cabo con entusiasmo y racionalidad, aunque se trataba de una empresa sin precedentes: Introducir computadoras en el mundo de la escuela como herramientas de cambio educativo.
El “logo” del Congreso representaba a la recientemente creada Asociación Amigos del Logo que durante 15 años y con diferentes modalidades impulsó el conocimiento del lenguaje y la filosofía Logo en el país. Organismo que presidí en sus últimos años en la década del 90, década que significó una involución en muchos aspectos de la vida cultural del país. Aunque a la distancia la Ley Federal de Educación de 1994, contenía principios muy valiosos, muy cercanos a los que se levantaron en el Congreso. Hoy por hoy el plan de mejora educativa de la escuela secundaria es un feroz retroceso en todo relacionado con la educación tecnológica en general e informática en particular.
LOGO DE LA ASOCIACIÓN AMIGOS DE LOGO
INGENIEROS HILARIO FERNÁNDEZ LONG Y HORACIO C. REGGINI
El estudio de los ingenieros Hilario Fernández Long y Horacio C. Reggini tuvo a su cargo la capacitación docente de la modalidad Logo. Sus virtudes humanas y académicas son un reflejo de lo que el Logo nos enseñó e inspiró. Maestro y alumno se unieron en la compleja actividad del cálculo numérico y luego en la quijotada educativa que emprendieron en 1981 y en la que nos acompañaron durante varios años. El ing. Fernández Long, ex rector de la Universidad de Buenos Aires entre otros cargos académicos, falleció en el 2012 y quién mejor que su alumno y amigo, Horacio Reggini para homenajearlo: “Fernández Long defendió las causas justas y la excelencia humana, y seguramente esto, junto a su capacidad de soñar, enciende en el alumno que fui yo la imagen de don Quijote, lo cual no quiere decir que no lo valore también como un modelo de ingeniero abocado a la práctica de su amada profesión… Creo que el maestro y amigo está aquí, muy cerca, abarcándonos a todos en su abrazo. Gracias.”
Palabras en el acto de homenaje a Hilario Fernández Long, en la Iglesia Santa Catalina de Siena, el 23 de junio 2003, al cumplirse seis meses del fallecimiento, convocado por las Academias Nacionales de Ciencias Exactas, Físicas y Naturales y de Educación.
VIDEO DEL ING. FERNÁNDEZ LONG HABLANDO DEL LOGO
Podemos ver en este último vídeo las primeras TI 99 que tenían la “fantástica” capacidad de 32 Kb de memoria y los antiguos disquettes donde cada chico guardaba sus trabajos y constituía un sustituto de los cuadernos de tarea. A la izquierda la computadora con el teclado incorporado y el cartucho con el Logo. Luego las memorias y finalmente la disquetera separada.
HORACIO C. REGGINI
El ingenio Horacio C. Reggini, que es, en la actualidad, miembro de la Academia Nacional de Ciencias Exactas y Naturales, miembro de la Academia Argentina de Letras y de la Academia Nacional de Educación fue el presidente del Congreso y tuvo a su cargo la apertura del mismo con su conferencia “Hacia una inserción humanista de las computadoras en la Educación”.
SELECCIÓN DE FRASES DE LA CONFERENCIA DEL ING. HORACIO C. REGGINI
“Hace tiempo, cuando buscábamos un lugar para realizar este Congreso, recorrimos teatros, salas y otros lugares donde habitualmente se acostumbra realizarlos. Pero queríamos un congreso diferente. Estaba en nuestras mentes la idea de árboles, de plantas, de flores. Hablábamos en las reuniones de la Asociación, en el despacho de la directora de este colegio, a muy pocos pasos de aquí. Y, como sucede a menudo, las cosas más cercanas, familiares y queridas son las que se nos escapan, las que no tenemos en cuenta. Sólo a veces, cuando nos faltan, reparamos en ellas. Un día se nos ocurrió este patio, el patio de una escuela primaria, que tiene un árbol, plantas y flores y donde siempre hay alegría, juegos y deseos de vivir. Este patio se convirtió así en un símbolo para este Congreso. Espero que su espíritu sea el que se manifieste a lo largo de estos días.”
Existe, la opinión generalizada de que la disponibilidad de nuevos medios tecnológicos produce inmediatamente una mejora automática en la calidad de la educación. Sin embargo, ni siquiera el más deslumbrante prodigio técnico puede garantizar un proceso en el que adquieren importancia predominante los aspectos personales.
La falta, de criterios definidos y de una filosofía orientadora, sumadas a una invasión masiva de las computadoras en todos los órdenes de la vida cotidiana, nos sitúa ante el riesgo de un desperdicio de sus potencialidades educativas y puede, incluso, llegar a ser perjudicial.
!Entre las muchas objeciones que se hacen a la introducción de las computadoras en la sociedad en general y en la educación en particular, la más frecuente es la afirmación de que desarrollan en las personas un tipo de pensamiento excesivamente lógico y científico, en oposición a la llamada “educación humanista”.
Esta oposición tan tajante pudo haber sido considerada en aquellos tiempos en que la ciencia y la tecnología eran tareas de laboratorio y en los que muy poca gente tenía acceso a ellas. Hoy ninguna persona puede evitar entrar en contacto con la ciencia y, en forma especial, con la tecnología; convive con ellas cotidianamente. Los medios de comunicación masiva la hacen partícipe de los últimos descubrimientos científicos; la tecnología ha entrado en las casas y los lugares de trabajo. Ambas modifican permanentemente los patrones culturales de la sociedad.
Contrariamente a lo que se cree, su objetivo principal es el alumno, el sujeto que aprende. No importa la máquina sino el niño que está aprendiendo.
El aprendizaje es un proceso de evolución, de elaboración y de maduración de experiencias anteriores antes que una acumulación de información o de habilidades, y las computadoras han de utilizarse entonces para facilitar este proceso.
La nueva tecnología debe ser comprendida y humanamente encaminada; de otra manera serán difíciles de afrontar los cambios que trae aparejados. Esperemos que las computadoras sirvan para unir felizmente lo ordinario con lo extraordinario, la inteligencia con las emociones.
La profesora Annelise de Forteza era entonces la rectora y Directora General del Colegio, y una de sus fundadoras. Todavía hoy sigue concurriendo y es en cierta forma una especie de «alma mater», que ha sostenido esa filosofía humanista que encarnó el Logo durante todos estos años. Sin ese apoyo difícilmente podría haberse mantenido vivo ese espíritu durante todos estos años.
En cuanto a mi persona, era entonces un modesto preceptor que observada todo con asombro, y aunque mi participación era periférica, en algunos momentos fui la voz del Congreso. Acá estoy a la izquierda de la imagen. Supongo que aclarando la garganta.
EL CONGRESO EN LOS MEDIOS GRÁFICOS
Prácticamente todos los principales medios gráficos le dieron al evento espacio en sus páginas:
La Nación, 17/09/1983
PARTICIPACIÓN DE LOS ALUMNOS
Un aspecto de la modalidad Logo fue desde siempre estimular la participación y el protagonismo de los alumnos en el proceso educativo, ya sea por la toma de conciencia de los procesos cognitivos o por la relevancia de sus producciones. En este aspecto el Congreso se destacó y diferenció claramente de experiencias previas. Los alumnos participaron presentando trabajos en forma de “workshop” o “conferencia”.
Chicos presentando sus trabajos en Logo.
Alumnos de secundaria en Conferencia
ALGUNOS DATOS Y VISITANTES
De un informativo del mes de noviembre extraemos estos datos: «Con una concurrencia que alcanzó los 1000 inscriptos, se desarrollaron las diversas actividades planeadas. Se presentaron y trabajos presentados por educadores u científicos del exterior: Robert Mohl (del Centre Mondiale d`Informatique de París); Manuel Otero Raña (de Galicia, España): Jimena Rojas de Liera (Colombia); Lea Fagundes (Brasil); Gustavo Silva (Uruguay) y Alejandro Rojo (Chile).
Numerosas delegaciones de 21 provincias contribuyeron al intercambio de ideas, junto a representantes de colegios de la Capital. Varias instituciones privadas y oficiales expusieron sus experiencias en diversos campos. Se escucharon conferencias del Ing. Horacio C. Reggini, Presidente del Congreso, del Dr. Antonio Battro y del Ing. Hilario Fernández Long.
El Congreso ha sido un exponente de la importancia de la participación infantil y juvenil en los eventos culturales. »
Lamento no tener más material, pues los anales del Congreso se han extraviado y esto seguro que serían muy útiles para conocer el contexto y las motivaciones que ese momento se vivían.
DIEZ AÑOS DESPUÉS – UNA SÍNTESIS DEL PERÍODO 1983 – 1993
Escribí una vez que todo movimiento tiene etapas definidas y constantes. Así en los inicios hay una etapa de entusiasmo y crecimiento vigoroso. Nuevas tecnologías, nuevas ideas y valores, entusiasman y dan un impulso enorme a los acontecimientos, Con el correr del tiempo, esos primeros vientos van amainando, o porque las expectativas se desilusionan o porque otros movimientos paralelos u opuestos nacen y se desarrollan, El mundo de la computación, sea administrativa, profesional o educativa, tiene una componente económica derivada del capitalismo. El capitalismo, y no lo defino peyorativamente, necesita crear la necesidad, o lo que es lo mismo renovar la demanda para vender. En 1983, el Logo tenía un interés especial para las empresas, tanto de hardware como de software, era como el caballo de Troya que permitiría expandir la oferta al mundo de las escuelas. Es sabido de muchos años que los niños son consumidores compulsivos. En 1993 el contexto político era diferente y las empresas había diversificado su oferta. La cultura humanista que el Logo promovió no era excesivamente consumidora de novedades. Hoy por hoy con FMS LOGO podemos encarar infinidad de proyectos sin piso y sin techo. Simultáneamente los que trabajábamos en Logo casi como si fuésemos militante de un proyecto global, observamos en la experiencia diaria que muchos de esos valores aprendidos en 1983, como la libertad y la creatividad, o el aprendizaje piageteano, tenían que ser revisados, criticados y actualizados. Ya en 1985, en una célebre conferencia de Seymour Papert «El tecnocentrismo y la crítica computacional», se nos había alentado a realizar una crítica amplia del sistema Logo y de como se lo aplicaba.
En 1993 presidía la Asociación Amigos de Logo y convocamos a una reunión para «celebrar» el 10º aniversario del Congreso. En esa oportunidad escribí la conferencia «1983 1993 Diez Años Después» , donde quizás influenciado por los cursos de marketing que tanto nos disgustaban a los docentes y pero que eran pertinentes en un contexto de extrema dificultad económica en el país, deslicé el subtitulo «Fortalezas y debilidades del Logo». Quizás debería esperar otros 10 años para publicarla, pero quizás no viva tanto. En ella analizo algunos de los pilares del enfoque Logo que habíamos recibido: la valoración de la creatividad, el aprendizaje piageteano como modelo a seguir, el aprendizaje por error, los beneficios de la programación y finalmente defino al Logo como un Vector que puede influenciar la resultante de un campo vectorial que contenía numerosas corrientes que se habían delineado desde 1983. Toda un metáfora de la época que vivíamos. De los Congresos Logo, habíamos pasado a los Congresos de Informática, donde los amigos del logo participábamos minoritariamente.
Para que este artículo no quede como una expresión nostalgiosa, haré una crítica de ciertas tendencias actuales a la luz de los conceptos e ideales que el Congreso de 1983 instaló en la agenda de sus participantes. Y esto es posible porque hay ciertas constantes que solo van cambiando de herramienta o de fachada. A pesar de los enormes cambios tecnológicos y el grado de divulgación que alcanzó la computadora desde entonces, debemos decir que lo que ha progresado es el ámbito de las comunicaciones. Estamos en la era del Facebook y Twitter, palabra que alude al gorjogeo de los pájaritos. El canario Tweety debería ser el emblema de cuál es la valoración de la tecnología actual, especialmente en los jóvenes: expresarse con un número limitado de palabras, darse a conocer con frases breves que al otro día o a la siguiente hora nadie recuerda, la continuidad un gorgojeo a menudo intrascendente. La computadora como herramienta para pensar, para crear, ha quedado relegada u olvidada. En las escuelas cada vez más se la utiliza con exclusividad como herramienta para la educación replicante. La mediocridad educativa que se ha expresado durante 30 años a través del Word, el PowerPoint, el Blog, etc., es valorada para volcar contenidos curriculares. . Hoy mismo en la ciudad de Buenos Aires, se propone eliminar la enseñanza de la computación y el docente de computación puede optar por ser el secretario informático del maestro o reciclarse a otra cosa.
En este contexto la divisoria entre nativos e inmigrantes digitales instalada por Mark Prensky le ha hecho mucho mal a la cultura y a la educación, no tanto por sus contenidos que son fácilmente refutables, sino por su formación académica que le da un status sobre valorado. Y si el hombre creó a Dios a su imagen y conveniencia, Prensky dividió a la humanidad a imagen y comparación de la computadora conectada. Pero el tema Prensky merece un desarrollo aparte. La filosofía que nos alimentó en aquel Congreso de 1983 fue totalmente opuesta, no se hablaba de dividir, sino de integrar y crear juntos una cultura «humanística» no disociada en tirios y troyanos.
Prensky: Espejito, espejito, dime quién es el más bonito
Prensky es un ejemplo más de como el mundo adulto se proyecta sobre el de los niños, sin tener en cuenta sus competencias cognitivas y afectivas. Parte de premisas falsas y llega a conclusiones falsas. Pongamos por ejemplo la valoración que el mundo adulto hace de la conectividad con Internet en la Educación de niños y jóvenes, que es una proyección de su propio mundo.
El adulto, un profesional por ejemplo, tiene su sistema lógico desarrollado, tanto a nivel concreto como abstracto. Tiene una identidad profesional, un dominio de un campo cognitivo específico, una auto motivación producto de su interés y de sus elecciones. Encuentra en la computadora un elemento importante o imprescindible. Valora acceder a múltiples centros de información, puede dar significado a los incontables bits de información, los puede jerarquizar, seleccionar e incorporar a su patrimonio cognitivo.
Nada de eso sucede en la escuela, desde el nivel inicial a la secundaria. En estas etapas, los alumnos están formando su sistema lógico, entendido como la capacidad de ordenar, jerarquizar y por lo tanto seleccionar. Ese sistema lógico además no es específico, la lengua, la matemática, las ciencias, las humanidades, las artes, demandan “lógicas específicas”, propias del conocimiento que ellas comprenden, y que los alumnos deben desarrollar en cada caso. Si la computadora reemplaza o acelera las lógicas modales de los alumnos, no solo es inservible para su desarrollo cognitivo sino que es perjudicial. Solo la tecnología que está detrás de la lógica del alumno y se pone a su servicio, le puede dar Alas para la Mente (título de una de las primeras publicaciones del Ing. Reggini). Mientras tanto esto no sea comprendido, el mundo adulto seguirá abarrotando escuelas con tecnologías inservibles y proyectos de corta existencia, tan corta como la vida útil de las máquinas.
Como una oración laica, los Prenskys de este mundo, repiten que la era tecnológica ha modificado los procesos cognitivos de los niños y la educación debe amoldarse a esos cambios. Pero como leemos en la conferencia del Ing. Reggini, la era tecnológica ya estaba presente hace 30 años y puedo asegurar que no hay cambios en el proceso del conocimiento, lo que hay son cambios en los estímulos, que no es lo mismo y como dice la canción de Lennon «Some have change, not for better».
No hacia falta un graduado de Harvard y de Yale para percibir que la computadora podía generar una escisión generacional. Ya en los 90 el periodista Roberto Cenderelli, buceaba en la misma dirección.
Estos chicos a quienes conocí ampliamente ya que fui su maestro de computación desde 6º grado hasta 5º año, a pesar de tener conciencia de que tenían una competencia especial respecto a sus padres, desarrollaron sus capacidades condicionados más que nada por su competencias cognitivas, sus intereses particulares y por las motivaciones que las propuestas de los docentes les presentaron, ni más ni menos que las generaciones anteriores. Las computadoras se insertaron y fueron funcionales a esas propuestas. Hoy ellos son padres de una nueva generación, ¿cómo catalogaría Prensky a esta generación? ¿Nativos 2º generación? Poco ha cambiado respecto a los procesos cognitivos de los humanos y hoy la neurociencia confirma lo que se sabe hace siglos.
NO IMPORTA LA MÁQUINA
Tampoco ha cambiado el perfil de las iniciativas gubernamentales, municipales, provinciales y nacionales, que parten de la incorporación de tecnología, es decir compran máquinas. Pareciera que la compra de las máquinas produciría por sí cambios “virtuosos” en alumnos y docentes. El plan «Igualdad» presume que niños de las villas, carenciados en alimentación, cultura, salud, estímulos, y un entorno demandante, igualarán sus oportunidades por el hecho de tener una Laptop. La ingenuidad es muy grande, o quizás el negocio sea muy grande. La experiencia demuestra una y otra vez que de esa manera se marcha al fracaso. No es la tecnología la que ilumina el proceso cognitivo, sino el saber de cada niño y joven el que ilumina, para bien o para mal, la tecnología, sin olvidar el papel fundamental de la cultura circundante y del docente como puente necesario entre el pasado de cada alumno y su futuro. Y es en este punto que resaltan, como un mensaje clarividente, las palabras del Ing. Reggini, que se escucharon aquel 16 de septiembre y que como las grandes verdades se mantienen actuales: No importa la máquina sino el niño que está aprendiendo.
Maestro y alumnos en el escenario.
El corolario es evidente, no tenemos que preocuparnos tanto por la tecnología, lo más complicado es conocer a los niños y jóvenes para tender puentes entre su universo cognitivo afectivo y los objetivos que cada nivel educativo se plantea. En lo institucional significa tener el valor de crear espacios creativos que definan las aplicaciones tecnológicas. Los cambios no provendrán de la tecnología, sino de las personas que pueden formar una cultura diferente. Sarmiento un apasionado de la tecnología, lo entendió así e «importó» maestras para formar generaciones de docentes, que en su época revolucionaron la educación argentina. Eso es humanismo, el cambio y el tipo de cambio, está en las personas y en el sistema de valores que ellas construyen cada día. No cabe ser muy optimista en estos tiempos.
«¿What could emerge from a time that changed the pursuit of creative society, by the obsession to be connected?»
«¿Qué podría surgir de un tiempo que cambió la búsqueda de la sociedad creativa, por la obsesión de estar conectados?»
El término recursividad utilizada en programación deriva de la palabra «recurrencia», es decir la acción de repetir una misma acción. Efectivamente la recursividad es la repetición de un conjunto de acciones definidas en un procedimiento. Suele asimilarse con el término «loop» o «lazo» o «ciclo» y aunque si bien es un «loop» en Logo tiene otras propiedades que le dan un poder que se utiliza en «programación avanzada» y que describiremos en este artículo.
Como Logo define los procedimientos con un nombre, la recursividad se obtiene incluyendo el nombre del procedimiento en el código del procedimiento antes del comando FIN. Esta propiedad de que un procedimiento se «llame» a sí mismo para perpetuarse tiene links filosóficos, biológicos y cosmológicos, ya que podemos asimilarlo a un «ente» que en su código genético tiene la potencialidad de recrearse a sí mismo y aspirar a la eternidad. También se asemeja a un juego borgiano de espejos que se reflejan a sí mismos creando imágenes que se reproducen hasta el infinito.
Cubo especular
ESQUEMA DE UNA RECURSIÓN
El esquema general de un procedimiento recursivo sería:
Esquema general
PARA PROCEDIMIENTO_NOMBRE
ACCIONES DEL PROCEDIMIENTO PROCEDIMIENTO_NOMBRE
FIN
Ejemplo
PARA ANÁFORA
ES [Menos tu vientre … ]
ESPERA 10 ANÁFORA
FIN
Donde la línea anterior al FIN, en rojo, es la «línea recursiva».
Los procedimientos recursivos aplicados a los gráficos de tortuga producen efectos siempre interesantes y sorprendentes, y es que la recursividad, en definitiva provoca una repetición, y la repetición crea un patrón, y el patrón conforma una «estructura» y el cerebro ama las estructuras. Por ejemplo, cualquier combinación de avances y giros de tortuga, cuya resultante no sea nula y cuya sumatoria de giros sea diferente a 0 o 180º generará una estructura circular.
RECURSIÓN INFINITA Y FINITA
Una recursión puede ser infinita cuando la recurrencia no tiene fin o finita si puede introducirse una regla para limitar el número de repeticiones.
RECURSIÓN INFINITA
PARA MRU
AV 10
ESPERA 1 MRU
FIN
RECURSIÓN FINITA
PARA MRUA :A SI :A > 100 [ALTO]
AV :A
GD 12 ESPERA 2 MRUA :A + 0.5
FIN
HERÁCLITO Y EL LOGOS
«Este cosmos, que es el mismo para todos, no ha sido hecho por ninguno de los dioses ni de los hombres, sino que siempre fue, es y será un fuego eterno y vivo que se enciende y se apaga obedeciendo a medida».
Heráclito
Heráclito fue un pensador griego nacido en Éfeso en el siglo V A.C. Conocido como «el oscuro» su pensamiento se conoce por la obra de autores posteriores. Ha sido iconizado como el filósofo del «devenir», «Cambia, todo cambia» cantaría hoy Heráclito. Que el cosmos sea fuego eterno y vivo, significa que está en constante transformación y destrucción, pero ese cambio se realiza «según medida», es decir siguiendo una ley, un patrón, que los griegos llamaron Logos. El Logos es lo que hace en definitiva comprensible y racionalizable la realidad.
Entre los programas recursivos, los generadores de espirales, son los más conocidos y combinan los gráficos de tortuga, con programas con variables, recursión con variación en serie y reglas de control. La introducción del azar crea estructuras variables donde no es sencillo encontrar un patrón, pero aun en esos casos el programador conoce la ley, el Logos que gobierna el cambio (que no es otra cosa que el procedimiento). Lo que visualmente parece caótico está generado por un procedimiento, un Logos que determina también el caos. En esta premisa se basa toda la ciencia, en que el Cosmos puede ser conocido por la mente y que en definitiva el Cosmos (orden) surgió del Caos.
COSMOS Y CAOS GENERADOS POR EL LOGOS
FANTASMAS EN LA RAM
La recursión tiene un efecto curioso, cuya necesidad ignoro pero debe estar relacionada con la forma que el Logo gestiona la memoria. Ese efecto radica en que cada recurrencia del procedimiento queda grabada en memoria. Recuerdo que en las antiguas Commodore 64, las recursiones sufrían una pausa durante la cual se efectuaba una «recolección de basura» (garbage collection), acción que liberaba la memoria de los «fantasmas» almacenados que no eran necesarios. Incluso tenía un comando llamado Recicla, que forzaba la recolección y que permitía al programador que ésta se produjese en un momento deseado y no durante una acción durante la cual era inconveniente una «pausa». Claro que estamos hablando de una máquina que tenía apenas 64 Kb de memoria. No se percibe ahora ese fenómeno, aunque no sé si es porque Logo ha cambiado la gestión de la memoria o porque la memoria es mucho más grande.
Como es de público conocimiento un FANTASMA se produce cuando la persona que muere tiene «deudas pendientes» :=), por lo tanto podemos visualizar este efecto de sembrado de «fantasmas» en la RAM si colocamos entre la línea recursiva y el FIN del procedimiento, al menos 1 línea de código.
Tomemos un caso sencillo.
Procedimiento recursivo
PARA CUENTA_3 :NUM
SI :NUM > 3 [ES [DONE] ALTO]
ES :NUM
CUENTA_3 :NUM + 1
FIN
Si ordenamos ahora CUENTA_3 1
1
2
3
DONE
Pero si entre la línea recursiva y el FIN escribimos
Procedimiento con fantasmas
PARA CUENTA_3 :NUM
SI :NUM > 3 [ES [DONE] ALTO]
ES :NUM
CUENTA_3 :NUM + 1 ES :NUM
FIN
Si ordenamos ahora CUENTA_3 1
1
2
3
DONE
3
2
1
La sentencia «fantasma» (en azul) no se ejecuta en el momento porque la línea recursiva lo impide, pero queda como una «orden pendiente» almacenada en RAM. Cuando la recursión llega a :NUM > 3, escribe la palabra [DONE] y antes de detenerse ejecuta todas las «órdenes pendientes» (fantasmitas). Veamos en el siguiente esquema lo que sucede paso a paso en función del valor de la variable :NUM
Valor de :NUM
Orden cumplida
Orden pendiente
1
2
3
4
1
2
3
DONE (ALTO)
ES 1
ES 2
ES 3
Se ejecutan las órdenes pendientes
3
2
1
APLICACIÓN DE LOS FANTASMAS
Utilizar esta propiedad de la recursión, tiene aplicaciones poderosas, al punto que recibe el nombre de «recursión avanzada». Sería sencillo comprender un procedimiento que haga y deshaga, por ejemplo:
PARA ESPIRAL :AV :ANG
SI :AV > 300 [LAPIZINVIERTE ALTO]
AV :AV
GD :ANG
ESPERA 2 ESPIRAL :AV + 10 :ANG GI :ANG RE :AV ESPERA 2
FIN
Las líneas fantasmas (en azul) pasarían por encima de la espiral borrando cada avance. Este programa de recursión avanzada, nos permitiría ver el nacimiento, desarrollo y extinción de la criatura espiral.
RECURSIVIDAD Y FRACTALES
La resolución de fractales es una de las aplicaciones más espectaculares de la recursión avanzada. ¿Qué es un «fractal»? El siguiente texto está extraído de la página http://www.fractovia.org/art/es/what_es1.shtml
Un fractal es un objeto que exhibe recursividad, o autosimilitud, a cualquier escala. En otras palabras, si enfocamos una porción cualquiera de un objeto fractal (imaginemos que utilizamos un magnificador, o hasta un microscopio, para ello), notaremos que tal sección resulta ser una réplica a menor escala de la figura principal.
Otro aspecto importante sobre los fractales es que su dimensión es fraccionaria. Es decir, en vez de ser unidimensional, bidimensional o tridimensional (como es el para los objetos que nos son más familiares), la dimensión en la mayoría de los fractales no se ajusta a dichos conceptos tradicionales. Más aún, su valor raramente puede ser expresado con un número entero. Esto es, precisamente, lo que les ha dado su nombre.
Probablemente, el primer objeto fractal puro en la historia, el polvo de Cantor, fue descrito por el matemático alemán Georg Cantor-inventor de la teoría de los conjuntos-alrededor de 1872. A pesar de ser una figura extremadamente sencilla, recoge todos los atributos discutidos sobre los fractales hasta el momento: presenta autosimilitud a cualquier escala y su dimensión es fraccionaria, con valor aproximado de 0,630929753571457437099527114 (log 2/log 3,si utilizamos una expresión más adecuada). Igualmente, podemos basarnos en él para introducir otra característica general de este tipo de objeto: son producidos por procesos de iteración.
La iteración puede describirse como un mecanismo de retroalimentación, que se repite un número n de veces. Esto se refiere, por ejemplo, al acto de utilizar un valor inicial en el cálculo de cierta función, y luego tomar el producto, o resultado, como valor inicial para el próximo cálculo de esa misma función. Dicha operación puede repetirse indefinidamente (incluso infinitamente), produciendo una iteración. Cualquier proceso semejante tendrá como resultado un fractal.
El polvo de Cantor se inicia con un segmento lineal (justamente, conocido como el iniciador); éste se divide en tres segmentos menores de la misma longitud, el central de los cuales se extrae. Este proceso (denominado, usualmente, como el generador) se repite indefinidamente, al final de lo cual-si tiene final- se habrá producido el polvo de Cantor.
Fractal de Cantor
Debo confesar que el tema de la «dimensión fractal» es algo que elude mi comprensión cabal, al menos por el momento, Leo en otra página una de las razones de mi dificultad: La medición de formas fractales (fronteras, poligonales, etc,) ha obligado a introducir conceptos nuevos que van más allá de los conceptos geométricos clásicos.
«Dado que un fractal está constituido por elementos cada vez más pequeños, el concepto de longitud no está claramente definido: Cuando se quiere medir una linea fractal con una unidad, o con un instrumento de medida determinado, siempre habrá objetos más finos que escaparán a la sensibilidad de la regla o el instrumento utilizado, y también a medida que aumenta la sensibilidad del instrumento aumenta la longitud de la línea.
Esto sucede con la curva de Koch. Cada paso en la génesis de la curva aumenta un tercio su longitud. Es decir la longitud de la curva que ocupa el espacio inicial va aumentando en cada paso su longitud de forma indefinida. Cada curva es 4/3 de la anterior.
LA CURVA DE KOCH
Creo que fue el primer fractal que vi en mi vida, allá por 1983, en una de las presentaciones del Primer Congreso Internacional Logo, un evento extraordinario que cumple 30 años y al que me dedicaré en algún momento. En la curva de Koch puede apreciarse bien el concepto de fractal. El procedimiento Logo adaptado para el FMS LOGO es:
para koch :n :l si :n= 0 [av :l alto]
koch :n – 1 :l / 3
gi 60
koch :n – 1 :l / 3
gd 120
koch :n – 1 :l / 3
gi 60
koch :n – 1 :l / 3
fin
Las líneas de accionamiento son los 3 giros y el avance de la longitud fractal, se hará cuando el n (nivel de fraccionamiento) sea 0, o sea al cierre de cada recursión.
Si ejecutamos koch 300 0, la tortuga graficará una línea recta de longitud = 300. En este caso L = lf
El procedimiento tiene 4 líneas recursivas, una por cada división de la línea recta inicial.
Cada recursión disminuye 1 el nivel de fraccionamiento y en 1/3 la longitud del avance.
En el caso koch 300 1, la figura es la que se ve abajo. Como vemos cada línea se divide en 4 segmentos iguales cuya longitud es 1/3 L.
La longitud de la curva fractal (lf) es entonces = 4/3 L .
Recursivamente para cada n, lf(n) = 4/3 lf(n -1)
Lf (N=1) = L
Lf (N=1) = (L/3) . 4
Lf (N=2) = ((L/3) / 3) . 4 . 4
Lf (N=3) = (((L/3) / 3) / 3) . 4 . 4. 4
Lf (N=4) = ((((L/3) / 3) / 3) / 3) . 4 . 4. 4.4
En general será entonces para un nivel n
Lf (n) = (L / 3 n). 4 n
Lf (n) = L .(4/3) n
En el caso de L = 500, entonces: Lf (7) = 500 .(4/3)7 = 3745.77 (valor aproximado a 2 decimales)
Podemos pedirle a la tortuga que resuelva el valor de la Longitud fractal. modificando el procedimiento para que acumule el valor de cada avance en la variable local :long, definida en el procedimiento longitud. El procedimiento longkoch graficará la curva entre n = 1 y n = 7 y acumulará los valores de :long en la variable local :lista. El color es una función del nivel. Además rotulará el nivel de la curva antes de graficarla y el valor de la longitud fractal al terminar.
para koch :n :l
si :n= 0 [av :l make «long :long + :l alto] koch :n – 1 :l / 3
gi 60 koch :n – 1 :l / 3
gd 120 koch :n – 1 :l / 3
gi 60 koch :n – 1 :l / 3
fin
para longitud
make «long 0
make «lista []
bp
sl ponpos [-250 290]
longkoch 1
fin
para longkoch :n
si :n = 8 [alto]
sl ponx -250 pony coory – 88 ponrumbo 90
bl
rotulo :n
poncl :n
koch :n 500
sl av 20 rotulo formatonumero :long 7 2
make «lista frase :lista formatonumero :long 7 2
make «long 0
longkoch :n + 1
fin
Como vemos el valor determinado para el nivel 7 es 3745.77 es similar al valor hallado analíticamente.
Cuando n -> ∞, la longitud fractal también, aunque el espacio L se mantiente constante. La superficie contenida por la curva «infinita» es finita.
Como la longitud de la linea fractal depende de la longitud de instrumento, o de la unidad de medida que tomemos, la noción de longitud en estos casos, carece de sentido. Para ello se ha ideado otro concepto: el de dimensión fractal. Que en el caso de las líneas fractales nos va a indicar de qué forma o en que medida una linea fractal llena una porción de plano. Y que además sea una generalización de la dimensión euclidea.
Sabemos que en geometría clásica un segmento tiene dimensión uno, un círculo tiene dimensión dos, y una esfera tiene dimensión tres. Para que sea coherente con lo dicho una línea fractal tiene que tener dimensión menor que dos (no llena toda la porción de plano). Y en los casos del conjunto de Cantor y de la curva de Koch menor y mayor que uno respectivamente: En el primer caso no llena todo el segmento de recta, y en el segundo es más largo. Sin embargo el caso del conjunto de Cantor es excepcional y no se puede considerar propiamente un fractal, en general lo que sucede es que la longitud de la curva fractal es superior al del segmento de recta que lo genera, y por tanto en general la dimensión fractal será un número comprendido entre uno y dos.
EL COPO DE KOCH
Podríamos «intervenir» o ampliar la curva de Koch. por ejemplo el clásivo COPO de KOCH que no es más que un triángulo equilátero que utiliza la curva como lado.
para copo_koch :n :l
repite 3 [koch :n :l gd 120]
fin
COPO_KOCH 3 600
COPO_KOCH 8 600
ESCARAPELA DE KOCH 8 600
Haciendo unos retoques en el procedimiento
para koch2 :n :l
si :n= 0 [av :l alto] koch2 :n – 1 :l / 3
gi 60 koch2 :n – 1 :l / 4
gd 120 koch2 :n – 1 :l / 3
gi 60 koch2 :n – 1 :l / 4
fin
Y ordenando REPITE 2 [koch2 6 100 gd 180] , obtenemos el perfil de la isla Margarita :=) (intervenida con Photoshop). Esta es una de las aplicaciones de los fractales, representar contornos de la naturaleza que no pueden reducirse a figuras geométricas convencionales.
ARBOL ¿FRACTAL?
También fue presentado en el Primer Congreso Internacional Logo, Pero aunque su resolució en Logo utiliza la técnica de recursión avanzada, recursiones dentro de una recursión, y la generación de figuras idénticas que disminuyen su tamaño, no estoy seguro ahora que sea un fractal, al menos no del mismo tipo que la curva de Koch, pues la división (fraccionamiento) no se realiza en un espacio constante L sino que aumenta con el nivel de fracción. Este es un árbol simétrico de nivel 8.
ÁRBOL NIVEL FRACTAL = 8
La figura iniciadora de este fractal sería una línea (el tronco) correspondiente al NIVEL 1, Pero para entender el proceso de división observemos el nivel 2. Del tronco salen 2 ramas con una disminución porcentual de longitud determinada por una variable constante. A su vez, en el nivel 3, de cada rama saldrán 2 ramas y así sucesivamente.
El procedimiento correspondiente es:
PARA ARBOL :niv :largo :escala :angu
si :niv = 0 [alto]
av :largo
gd :angu
ARBOL :niv – 1 :largo*:escala :escala :angu
gi 2 * :angu
ARBOL :niv – 1 :largo*:escala :escala :angu
gd :angu
re :largo
FIN
Tiene 4 inputs
:niv es el nivel de división fractal, la cantidad de ramas incluido el tronco.Va disminuyendo en 1 y es el input de control, ya que cuando llega a 0 se detiene la recursión.
:largo es la longitud del tronco. Se va modificando con la escala, que en los ejemplos anteriores es menor a 1 y por lo tanto el largo de las ramas disminuye en esa proporción.
:escala es el coeficiente de variación entre las ramas de cada nivel. Si fuese 1 las ramas serían todas iguales al tronco. La naturaleza indica que debe ser menor que 1 para que las ramas disminuyan su tamaño,:
angu es el ángulo entre las ramas que es constante.
El procedimiento tiene 2 líneas recursivas (marcadas en rojo). Si el procedimiento fuese reducido hasta la primer recursión, quedaría:
PARA ARBOL :niv :largo :escala :angu
si :niv = 0 [alto]
poncl :niv
av :largo
gd :angu
ARBOL :niv – 1 :largo*:escala :escala :angu
fin
Nivel = 4 (4 ramas)Largo de la primer rama= 200Coeficiente variación = 0,8Ángulo entre ramas del mismo nivel = 45º
Nivel = 4 (4 ramas)Largo de la primer rama= 300Coeficiente variación = 0,6Ángulo entre ramas del mismo nivel = 45º
Nivel = 4 (4 ramas)Largo de la primer rama= 200Coeficiente variación = 0,6Ángulo entre ramas del mismo nivel = 25º
El segmento azul corresponden al nivel 1, el verde al 2, el celeste al 3 y el rojo al 4.
Para largo inicial = 200, coeficiente = 0,8 y ángulo = 45, podemos ver abajo la variación del árbol fractal para 14 <= Nivel => 1
El pase de diapositivas requiere JavaScript.
FANTASMAS QUE GENERAN FANTASMAS
La primer recursión genera «acciones pendientes» que a su vez generan acciones pendientes. Llamaremos:
PARTE A a las líneas AV :largo gd :angu
PARTE B a GI :angu *2 (queda entre las 2 recursiones)
PARTE C a RE :largo GD :angu
La PARTE A es la acción activa que grafica las ramas, La PARTE B corrige el giro. La PARTE C retrocede las ramas.
La cantidad de ramas es una función del nivel de la recursión
NIV 1 1 RAMA R1 = 2 NIV – 1
NIV 2 3 RAMAS R2 = R1 + 2 NIV – 1
NIV 3 7 RAMAS R3 = R 2 + 2 NIV – 1
NIV 4 15 RAMAS R4 = R3 + 2 NIV – 1
NIV 5 21 RAMAS R5 = R4 + 2 NIV – 1
En general Rn = R n-1 + 2 ^n-1
La secuencia de acciones y «acciones pendientes» en cada nivel sería:
Nivel
Acción
Pendientes B
Pendientes C
2
Av 200 Gd 30
Gi 60 (2)Árbol 1 100
Gd 30 re 200 (2)
1
Av 100 Gd 30
Gi 60 (11)Arbol 0 50
Gd 30 re 100 (1)
1
Gi 60 (11)
1
Gd 30 Re 100 (1)
2
Gi 60 (2)
1
(Arbol 1 100)Av 100 Gd 30
Gi 60 (12)Arbol 0
Gd 30 re 100 (1)
1
Gi 60 (12)
1
Gd 30 Re 100 (1)
2
Gd 30 Re 200 (2)
Para un árbol de nivel = N habrá N avances, N GI :angu *2 y N retrocesos.
VARIACIONES COLORIDAS
PARA ARBOL1 :niv :largo :escala :angu
si :niv = 0 [alto]
pongrosor entero :niv / 2
poncl :niv
av :largo
gd :angu
ARBOL1 :niv – 1 :largo*:escala :escala :angu
gi 2 * :angu
ARBOL1 :niv – 1 :largo*:escala :escala :angu
poncl :niv
gd :angu
re :largo
fin
A este procedimiento se le ha agregado el grosor y el color en función del Nivel.
(Clickea sobre una de las imágenes para verlas en su real dimensión)
arbol1 12 400 0.66 110
arbol1 12 200 0.66 20
arbol1 12 200 0,66 30
arbol1 200 0.66 45
arbol1 12 300 0.66 90
EL BOSQUE NO DEJA VER EL ÁRBOL
PARA ARBOL2 :niv :largo :escala :angu
si :niv = 0 [alto]
pongrosor entero :niv / 2
poncl (frase :niv*5 :niv*10 :niv*10)
av :largo
gd :angu
ARBOL2 :niv – 1 :largo*:escala :escala :angu
gi 2 * :angu
ARBOL2 :niv – 1 :largo*:escala :escala :angu
poncl (frase :niv*2 :niv*3 :niv*4)
gd :angu
re :largo * 1
fin
BOSQUE ARBOL2
INTERVENCIONES ARBÓREAS
Agreguemos una línea recursiva más y debajo de ella la graficación de un triángulo: BL gi 30 repite 3 [av :niv*3 gd 120] gd 30
PARA ARBOL4 :niv :largo :escala :angu
si :niv = 0 [alto]
pongrosor entero :niv / 2
poncl 10
av :largo
gd :angu ARBOL4 :niv – 1 :largo*:escala :escala :angu
gi 2 * :angu ARBOL4 :niv – 1 :largo*:escala :escala :angu
poncl 0
SL gd :angu
re :largo
BL ARBOL4 :niv – 1 :largo*:escala :escala :angu
poncl 5
BL gi 30 repite 3 [av :niv*3 gd 120] gd 30
fin
(Clickea sobre una de las imágenes para verlas en su real dimensión)
ARBOL4 9 200 07 35
arbol4 8 200 0.7 40
arbol4 8 280 06 30
arbol4 9 200 0.7 30
arbol4 10 320 0.65 90
arbol4 12 220 0.65 30
En ARBOL4BIS agregamos un arco de circunferencia con la línea: REPITE 30 [GI 5 RE :niv] gd 30
(Clickea sobre una de las imágenes para verlas en su real dimensión)
arbol4BIS 10 320 0.65 80
ARBOL4BIS 9 160 0.75 40 (color al azar)
ARBOL4BIS 9 180 0.7 30
arbol4BIS 6 300 0.55 35
arbol4BIS 8 300 06 60
arbol4bis 9 200 07 30
ARBOLES ASIMÉTRICOS
En ARBOLX la variación reside en la línea gi :angu en lugar de gi :angu * 2
PARA ARBOLX :niv :largo :escala :angu
si :niv = 0 [alto]
pongrosor entero :niv / 2
poncl :niv + 10
av :largo
gd :angu ARBOLX :niv – 1 :largo*:escala :escala :angu gi :angu ARBOLX :niv – 1 :largo*:escala :escala :angu
sl
re :largo
bl
fin
Ejecutando arbolx 16 200 0.7 30 (16 niveles de fractal, 200 = L inicial, 0,7 coeficiente de variación de L y 30º de ángulo.
arbolx 16 200 0.7 30
Ejecutando arbolx 16 200 0.7 30 y luego arbolx 16 200 0.7 -30, obtenemos:
(Clickea sobre una de las imágenes para verlas en su real dimensión)
arbolx 16 200 0.7 30 y arbolx 16 200 0.7 -30
arbolx 12 200 0.7 45 + arbolx 12 200 0.7 -45
En ARBOLX2 el cambio está en la linea gi :angu * 1.5 en lugar de gi :angu * 2. El efecto es que las ramas de desplazan hacia la derecha. Si el cambio fuese gi :angu * 2.5 el desplazamiento sería hacia la izquierda.
PARA ARBOLX2 :niv :largo :escala :angu
si :niv = 0 [alto]
pongrosor entero :niv / 2
poncl :niv + 11
av :largo
gd :angu ARBOLX2 :niv – 1 :largo*:escala :escala :angu
gi :angu * 1.5 ARBOLX2 :niv – 1 :largo*:escala :escala :angu
sl GD :ANGU * 0.5
re :largo
bl
fin
(Clickea sobre una de las imágenes para verlas en su real dimensión)
arbolx2 16 280 0.65 90
arbolx2 16 200 0.65 30
arbolx2 10 200 0.65 60
Finalmente en arbolx3 reemplazamos los avances por arcos definidos por REPITE ENTERO :LARGO [AV 1 GD :AN], donde :AN es un input que define la curvatura del arco.
(Clickea sobre una de las imágenes para verlas en su real dimensión)
arbolx3 20 200 0.7 0.1
arbolx3 10 200 0.7 90 0.25
arbolx3 14 200 0.7 45 0.15
arbol3 8 200 0.7 90 0.3
EN BUSCA DE LA INMORTALIDAD
Decidido a encontrar un FRACTAL que lleve mi nombre y pasar a salón de la inmortalidad tal como el sueco Helge von Koch, o los polacos Benoit Mandlebrot, y Waclaw Sierpinski, encontré un procedimiento que resultó en un «fractal» difícil e clasificar, quizás un seudofractal.
para acuad1 :niv :lado :co
si :niv = 0 [alto]
poncl 1 + azar 14
av :lado / 2
gi 90 acuad1 :niv – 1 :lado * :co :co
gd 180 acuad1 :niv – 1 :lado * :co :co
gi 90
av :lado /2
fin
Los giros son gi 90 y el giro intermedio gi 180. La sucesión de figuras entre n = 1 y n = 8 sería :
El pase de diapositivas requiere JavaScript.
Una curiosidad de este procedimiento es que en el nivel 2 a partir de la L original se genera 1 rama, pero luego de cada rama surgen 2 ramas. La Longitud fractal es una progresión aritmética a partir del nivel 2. Quizás este sea un NonFractal de Eduardo Cavallo, pero visualmente interesante.
L0 = 0
L1 = L
L2 = L + L. :co
L3 = L + L . co + L . co . co * 2
L4 = L + L . co + L . co . co * 2 + L . co . co . co * 2 * 2
Ln = L + L . co + L . co . co * 2 + L . co . co . co * 2 * 2 + … + L . co ^ (n-1) . 2 ^(n-2)
(Clickea sobre una de las imágenes para verlas en su real dimensión)
acuad1 15 800 0.5 nivel 15
acuad1 15 800 0.67 Nivel 15
El procedimiento acuad ha sido «adornado» con un círculo después del avance av :lado / 2 REPITE 90 [AV 1 GD 4]
para acuad :niv :lado :co
si :niv = 0 [alto]
pongrosor entero :niv / 2
poncl 1 + azar 11 av :lado / 2 REPITE 90 [AV 1 GD 4]
gi 90 acuad :niv – 1 :lado * :co :co
gd 180 acuad :niv – 1 :lado * :co :co
gi 90 av :lado /2 REPITE 90 [AV 1 GD 4]
fin
(Clickea sobre una de las imágenes para verlas en su real dimensión)
acuad 5 900 0.6
acuad 8 90 0.65
acuad 12 800 07
ARBOL 3D
En el libro Ideas y Formas del Ing. Horacio C. Reggini, ya citado en otro artículo sobre Logo tridimensional, se publicó el procedimiento para un arbol fractal en 3d. Traducido a los comandos FMSLOGO
para arbol3d :l :b :niv :co si :niv = 0 [alto] pongrosor :niv poncl (6 – :niv) * 2 av :l repite :b [gi 45 arbol3d :l * :co :b :niv-1 :co gd 45 rightroll 360 / :b] poncl (6 – :niv) * 2 re :l fin
La línea recursiva tiene la novedad de que está dentro de un repite. Las variables son:
:l el largo de la primera rama
:b la cantidad de ramas (entre rama y rama hay un rightroll (rolar a la derecha)
:niv la cantidad de niveles fractales
:co el coeficiente en que las ramas disminuyen entre nivel y nivel.
(Clickea sobre una de las imágenes para verlas en su real dimensión)
arbol3d 300 2 5 0.6 2 ramas, 4 niveles
arbol3d 300 6 5 0.6 6 ramas, 5 niveles
arbol3d 300 6 6 06 6 ramas, 5 niveles
arbol3d 300 13 4 0.58 13 ramas, 4 niveles
arbol3d 300 4 5 0.6 4 ramas, 5 niveles
arbol3d 300 5 8 0.55 5 ramas, 8 niveles
COMPOSICIONES 3D
Reflejo en el agua Intervención en Photoshop
Partido por un rayo
EL ARBOL DE PURMAMARCA
METAMORFÓSIS. Fusionando Logo con Morphings,
Imagen del árbol tomada en Purmamarca.
LA DANZA DEL ÁRBOL 3D
Esta animación fue compaginada en Movie Maker a partir de 90 frames generados en FMS LOGO con los siguientes procedimientos, previa creación de la variable local «animacion3d
Haz «animacion3d 1
animacion3d1 1
para animacion3d1 :num
si :num > 36 [animacion3d2 :num alto]
limpia
arbol3d 300 5 5 0.55
rightroll 10
downpitch 3 guardadib (palabra «animacion3d :num «.bmp)
animacion3d1 :num + 1
fin
para animacion3d3 :num
si :num > 80 [animacion3d4 :num alto]
limpia
arbol3d 300 5 5 0.55
leftroll 10 guardadib (palabra «animacion3d :num «.bmp)
animacion3d3 :num + 1
fin
para animacion3d4 :num
si :num > 90 [alto]
limpia
arbol3d 300 5 5 0.55
uppitch 5 leftroll 1 gi 5 guardadib (palabra «animacion3d :num «.bmp)
animacion3d4 :num + 1
fin
LOS FRACTALES DE SIERPINSKI
leemos en la Wiki, que Waklau Franciszek Sierpinski fue un notable matemático polaco (1882 – 1969). Son notables sus aportaciones a la teoría de conjuntos, la teoría de números, la topología y la teoría de funciones. En la teoría de conjuntos realizó importantes contribuciones para el axioma de elección y la hipótesis del continuo. Estudió la teoría de la curva que describe un camino cerrado que contiene todos los puntos interiores de un cuadrado. Publicó más de 700 trabajos y 50 libros.
Tres conocidos fractales llevan su nombre: el triángulo de Sierpinski, la alfombra de Sierpinski y la curva de Sierpinski. También los números de Sierpinski en teoría de números han sido nombrados así en su honor.
EL TRIÁNGULO DE SIERPINSKI
Parte de un triángulo equilátero que se divide en 4 triángulos igualmente equiláteros y de igual superficie entre sí. En el siguiente nivel cada triángulo del nivel – 1 se subdivide en 4 triángulos y así hasta el infinito (y más allá …). Si Sn es la superficie del triángulo más pequeños de cada nivel, tenemos que: Sn = S (n-1) / 4 , en el límite la S∞ = 0. Veamos la serie entre 1 y 12
Nivel 1
Nivel 2
Nivel 3
Nivel 4
Nivel 5
Nivel 6
Nivel 7
Nivel 8
Nivel 9
Nivel 10
Nivel 12
El procedimiento LOGO sería:
para triserpi :niv :lado si :niv = 0 [alto] poncl 7 av :lado gd 120 triserpi :niv – 1 :lado / 2 poncl 7 av :lado gd 120 triserpi :niv – 1 :lado / 2 poncl 7 av :lado gd 120 triserpi :niv – 1 :lado / 2 fin
LA PIRÁMIDE DE SIERPINSKI
Recurrimos a los comandos tridimensionales para graficar la pirámide de Serpinski.
para zerpinskypiramide
perspectiva
pongrosor 1
sl gi 90 av 300 gd 90 re 250 bl
repite 4 [downpitch 35 gd 30 triserpi 6 1200 gd 60 av 600 gi 90 uppitch 35 rightroll 90 ] fin
Pirámide Caras nivel = 6
ANIMACIÓN DE LA PIRÁMIDE DE SIERPINSKI
Esta animación está constituida por 90 «cuadros» generados en FMS LOGO y compaginados y musicalizados en Movie Maker. La animación consta de 6 partes correspondienes a los siguientes procedimientos. Recordar que para trabajar con los comandos tridimensionales hay que colocar previamente la orden PERSPECTIVA.
para animacionserpi1 :num
si :num > 12 [ animacionserpi2 :num alto]
rightroll 10
limpia
sl downpitch 90 re 40 uppitch 90 bl
repite 4 [downpitch 35 gd 30 aatri 5 720 gd 60 av 360 gi 90 uppitch 35 rightroll 90 ]
guardadib (palabra «pirazerpi :num «.bmp)
animacionserpi1 :num + 1
fin
para animacionserpi2 :num
si :num > 21 [sl gd 90 av 180 gi 90 downpitch 90 av 180 uppitch 90 animacionserpi3 :num alto]
limpia
sl re 10 gi 5 bl
repite 4 [downpitch 35 gd 30 aatri 5 720 gd 60 av 360 gi 90 uppitch 35 rightroll 90 ]
guardadib (palabra «pirazerpi :num «.bmp)
animacionserpi2 :num + 1
fin
para animacionserpi3 :num
si :num > 33 [animacionserpi4 :num alto]
limpia
rightroll 12
sl downpitch 90 re 180 uppitch 90 gd 90 re 180 gi 90 bl
repite 4 [downpitch 35 gd 30 aatri 5 720 gd 60 av 360 gi 90 uppitch 35 rightroll 90]
sl gd 90 av 180 gi 90 downpitch 90 av 180 uppitch 90
guardadib (palabra «pirazerpi :num «.bmp)
animacionserpi3 :num + 1
fin
para animacionserpi4 :num
si :num > 42 [sl downpitch 90 re 180 uppitch 90 gd 90 re 180 gi 90 bl animacionserpi5 35 :num alto]
limpia
poncl 3
uppitch 4 gi 6
sl downpitch 90 re 180 uppitch 90 gd 90 re 180 gi 90 bl
repite 4 [downpitch 35 gd 30 aatri 5 720 gd 60 av 360 gi 90 uppitch 35 rightroll 90]
sl gd 90 av 180 gi 90 downpitch 90 av 180 uppitch 90
guardadib (palabra «pirazerpi :num «.bmp)
animacionserpi4 :num + 2
fin
para animacionserpi5 :ang :num
si :ang < -30 [animacionserpi6 :ang :num alto]
limpia
bl
repite 4 [downpitch :ang gd 30 aatri 5 720 gd 60 av 360 gi 90 uppitch :ang rightroll 90]
guardadib (palabra «pirazerpi :num «.bmp)
animacionserpi5 :ang – 1 :num + 1
fin
para animacionserpi6 :ang :num
si :ang > 90 [alto]
limpia
bl
repite 4 [downpitch :ang gd 30 aatri 5 720 gd 60 av 360 gi 90 uppitch :ang rightroll 90]
guardadib (palabra «pirazerpi :num «.bmp)
animacionserpi6 :ang + 1 :num + 1
fin
DELIRIOS FRACTALES
Los delirios fractales son experimentos con procedimientos recursivos que fui creando y transformando de acuerdo a lo que resultaban, en busca de un placer estético. Uno de ellos lo «intervine» manualmente rellenando con color.
para acuadra :niv :lado :co
si :niv = 0 [alto]
pongrosor entero :niv / 10
poncl 1
av :lado / 3
gi 90 acuadra :niv-1 :lado*:co :co
gd 180 acuadra :niv-1 :lado*:co :co
poncl 8
AV :lado / 3
gI 90
fin
para acuadra1
bp sl ponxy -200 -180 bl
acuadra 18 60 0.8
fin
DELIRIO FRACTAL CUADRA1 N = 18
para acuadra2
bp sl ponxy -200 -110 bl acuadra 24 40 0.8
fin
Este fractal fue intervenido manualmente y pintado con el comando RELLENA
DELIRIO FRACTAL DELIRIO3 22 190 0.6 0
DELIRIO FRACTAL DELIRIO 3 22 190 0.6 10
LA ALFOMBRA DE SIERPINSKI
Dejo como desafío la resolución en Logo de este fractal que parte de 1 cuadrado de dimensión L, que en el siguiente nivel se subdivide en 9 cuadrados de igual dimensión y así sucesivamente.
En este tiempo que me ha tomado reunir el material, recrear los procedimientos, crear variaciones, compaginar los cuadros en vídeo, he sentido la dificultad de comprender los procesos fractales y encontrar aplicaciones. Aunque éstas están definidas, la falta de un conocimiento matemático profundo ha sido un obstáculo para hallar la «clave» de la programación de cualquier fractal. Es un magnífico ejemplo de cómo el conocimiento específico de lo que se desea programar, debe anteceder al conocimiento operatorio, en este caso de la programación.
Me adentraré entonces en otra aplicación de la recursión avanzada, que sí me es familiar y transparente. La creación de funciones alfanuméricas complejas que barren recursivamente un input y operan sobre él. Esta aplicación hace uso del comando DEVUELVE, en FMS LOGO DEV, en Micromundos RE (Reporta), Este comando permite que un procedimiento «devuelva» una valor que puede ser argumento de otro procedimiento. Logo posee comandos reporteros que pueden utilizarse como argumento de otros procedimientos, por ejemplo:
POS (devuelve la posición de la tortuga activa)
COORX (devuelve la coordenada X de la tortuga aiva)
FECHA (devuelve una lista con la fecha y la hora actual)
Como hemos dicho pueden utilizarse como argumentos de otros procedimienos. Por ejemplo
ES FECHA
Thu Aug 08 00:36:26 2013
ES POS
300 0
SI COORX > 200 [ALTO]
CREANDO REPORTEROS SIMPLES
Como el comando FECHA reporta la Fecha y hora actual, creemos 2 reporteros diferentes;ç
Para fecha?
dev (frase item 1 hora item 2 hora item 3 hora item 5 hora)
fin
para hora?
dev (item 4 hora)
fin
es hora Thu Aug 08 09:30:51 2013
es fecha? Thu Aug 08 2013
es hora? 09:30:59
DEVOLUCIÓN DE FANTASMAS EN RECURSIÓN AVANZADA
Combinemos la propiedad de la recursión de dejar tareas pendientes en memoria y el comando DEV para crear un procedimiento que devuelva el resultado de una operación iterativa. por ejemplo que devuelva la suma de una lista de valores numéricos. Llamemos a la función SUMA como en el Excel.
para suma :listado si vacio? :listado [dev 0] dev (primero :listado) + suma menosprimero :listado fin
La recursión devuelve el valor del primer elemento de la lista numérica + el resultado del procedimiento con la lista dismimuida en su 1º elemento y así sucesivamente hasta que la lista quede vacía. Los valores de la suma quedarán en memoria hasta que vacio? :listado sea cierto. La consecuencia tiene que ser una devolución (no hay que poner alto) porque la estructura de la recursión demanda que cada ciclo devuelva algo. En general esta última devolución que además detiene el ciclo debe ser el elemento neutro respecto a la operación. En este caso es el 0 porque la operación es la suma. Analicemos como funciona el procedimiento en cada iteración.
SUMA [1 2 3]
Acción
Pendientes
Suma [1 2 3]
1 +
Suma [2 3]
2 +
Suma [3]
3 +
Suma []
0
Al detenerse se ejecutan las «acciones pendientes», 1 + 2 + 3 + 0 = 6
ES SUMA [1 2 3]
6
para factorial :n
si :n = 0 [dev 1] dev :n * factorial :n – 1 fin
Si n=0 devuelve 1 que es el elemento neutro del producto. Además por definición el factorial de 0 es 1.
Acción
Pendiente
Factorial 4
4 *
Factorial 3
3 *
Factorial 2
2 *
Factorial 1
1 *
Factorial 0
1
Al detenerse se ejecutan las «acciones pendientes», 4 * 3 * 2 * 1 * 1
ES FACTORIAL 4
24
IZQ Y DER
Creemos en Logo las funciones IZQ (texto) (nº caracteres) y DER (texto) (nº caracteres) como las que existen en EXCEL.
PARA IZQ :WORD :NUM SI :NUM > CUENTA :WORD [DEV «ERROR] (Donde » es el elemento neutro de la operación PALABRA) SI :NUM = 0 [DEV «] DEV PALABRA PRIMERO :WORD IZQ MP :WORD :NUM – 1 FIN
Acción
Pendiente
IZQ “LOGUEAR 3
Palabra L
IZQ “OGUEAR 2
Palabra O
IZQ “GUEAR 1
Palabra G
IZQ “UEAR 0
“
Al detenerse se ejecutan las operaciones PALABRA «L PALABRA «O PALABRA «G «
IZQ «LOGUEAR 3
LOG
PARA DER :WORD :NUM
SI :NUM > CUENTA :WORD [DEV «ERROR]
SI :NUM = 0 [DEV «]
DEV PALABRA DER MU :WORD :NUM – 1 ULTIMO :WORD
FIN
Acción
Pendiente
DER “PROLOGO 4
PALABRA (DER siguiente) “O
DER “PROLOG 3
PALABRA (DER siguiente) “G
DER “PROLO 2
PALABRA (DER siguiente) “O
DER “PROL 1
PALABRA (DER siguiente) “L
DER “PRO 0
“
Al finalizar se ejecutan las acciones pendientes PALABRA «L PALABRA «O PALABRA «G PALABRA «O «
DER “PROLOGO 4
LOGO
Aparentemente ejecuta las pendientes en sentido inverso, pero sucede que la recursión pendiente en N = 4 (DER 3) la deriva hasta DER 1 de donde comienza a ejecutar la operación,
BASE NUMÉRICA
El siguiente procedimiento recursivo devuelve un número en base 10 en la base indicada en el 1º INPUT
PARA BASE :B :NUM
SI :NUM < :B [DEV :NUM]
DEV PALABRA BASE :B ENTERO :NUM / :B RESTO :NUM :B
FIN
ES BASE 2 10 1010 ES BASE 4 10 22
ES BASE 8 10 12
ES BASE 10 10 10
JERINGOZO
El siguiente procedimiento recibe una palabra y devuelve la misma en «jeringozo»
PARA JERINGOZO :WORD
SI VACIO? :WORD [DEV «]
SISINO MIEMBRO? PRIMERO :WORD [A E I O U] [DEV PALABRA (PALABRA PRIMERO :WORD «P PRIMERO :word) JERINGOZO MP :WORD] [DEV PALABRA PRIMERO :WORD JERINGOZO MP :WORD]
FIN
es jeringozo «logo
loPogoPo
es jeringozo «argentina
aPargePentiPinaPa
es jeringozo «amor
aPamoPor
es jeringozo «eduardo
ePeduPuaPardoPo
SACARVOCALES
PARA SACARVOCALES :WORD
SI VACIO? :WORD [DEV «]
SISINO MIEMBRO? PRIMERO :WORD [A E I O U] [DEV SACARVOCALES MP :WORD ] [DEV PALABRA PRIMERO :WORD SACARVOCALES MP :WORD]
FIN
ES SACARVOCALES «MARIPOSA
MRPS
ES SACARVOCALES «MONITOR
MNTR
ES SACARVOCALES «CATALINA
CTLN
EPÍLOGO
En este viaje, siempre incompleto, por el mundo de la recursión, nos permite palpar la cualidad del Logo (no en exclusiva) de conectar lo elemental con lo complejo, «sin piso, sin techo» como decía Papert. Recientemente comentaba a mis alumnos que el material Meccano es como el Logo, un material para armar dirigido a niños que pueden lograr, a partir de piezas elementales, construcciones a medida de sus posibilidades: Desde una hamaca, un pequeño auto, un subibaja o un tobogán. Pero al mismo tiempo es el material que utilizan profesionales para construir complejos diseños: relojes, grúas, motores y brazos. Es en definitiva el conocimiento conceptual y fáctico, así como el nivel evolutivo de nuestros esquemas lógicos con los cuáles entendemos y manipulamos el mundo que nos rodea, los que dan alas a nuestras ideas y los que, en cierta forma, también determinan nuestros intereses y nuestra voluntad .
En lo personal he desafiado un límite. Puedo construir y experimentar con recursión avanzada, jugar con los fantasmas sembrados en la RAM, pero no he logrado representar mentalmente el complejo mapa de relaciones entre ciclos que quedan pendientes dentro de ciclos que quedan pendientes dentro de ciclos que quedan …
La gestación de este proyecto fue inusual, como verán en la primera imagen, está montado en una estructura cúbica, que era parte de un gran proyecto anterior: El teatro Colón. Este se prolongó durante 3 años, durante los cuales se construyeron la sala del público y el gran escenario con foso levadizo, parrilla de luces, grúa puente, escenario giratorio, luces de escenario, etc. Llegamos a programar una escena de Peter Pan volando por el aire, totalmente automatizada. Algún día describiré este hermoso proyecto, del cual queda solamente esta estructura cúbica.
Estructura cúbica en Meccano
POTENCIAL GRAVITATORIO
En el 2011 utilizamos esta estructura para la unidad «Potencial Gravitatorio» que desarrollamos en 4º grado. Allí se colocaron las rampas que se ven en los laterales, que son en realidad segmentos de «cablecanal». Hay varios juegos tipo «laberinto» que crean un recorrido para una bolita donde el motor es la fuerza de la gravedad. Fue conversando con los chicos de 4º grado que se nos ocurrió la idea de crear un mecanismo que recogiese la bola y la volviese a elevar, creando un ciclo mecánico, una especie de reloj gravedad antigravedad.
El desafío era adecuado para los alumnos de 1º año, nivel donde se estudian los principios del sensado y se aplican a la construcción de mecanismos automatizados (como lo era el Teatro Colón). En octubre del 2011 iniciamos el proyecto, que quedó semi terminado a fin de año y que se continuó y perfeccionó en el 2012 donde fue presentado en la Feria de Computación con la que el colegio Bayard celebró sus 30 años con las computadoras.
Este evento fue especial para nosotros por muchos motivos, uno de ellos de orden técnico: se aplicaron las nuevas interfaces Neotec para robótica. El diseño del hardware es de Martín Schwartz y el software, basado en FMS LOGO es autoría de Alejandro Lavagnino, ambos integrantes del Laboratorio de Medios del colegio.
CARACTERÍSTICAS DE LA NUEVA INTERFAZ
NUEVA INTERFAZ NEOTEC
Tiene 4 entradas cuya tensión puede variar entre 0 y 12 Volts (CC). Pueden conectarse motores de CC, servomotores y paso a paso.
Tiene 6 salidas para diferentes tipos de sensores: tacto, temperatura, luz, cercanía, etc.
Se conecta al puerto USB, pero también tiene la opción del viejo puerto serie.
Puede trabajar en forma inalámbrica con el protocolo Blue Tooth.
CAMBIA, TODO CAMBIA
La nuevas características de la interfaz nos llevaron a tener que renovar gran parte del equipamiento electromecánico: las lamparitas de filamento fueron reemplazadas por leds y los motores de CC de Meccano que cumplieron un noble y largo servicio, por motoreductores (Ignis). Al no ser motores específicamente Meccano, tuvimos que solucionar el problema del montaje, cosa que hicimos en parte con una placa con bordes (3 x 5) como se ve en la figura, acomplándola con pegamento y tornillos. No es una forma totalmente satisfactoria pero sí económica.
MOTOR IGNIS CON ACOPLE MECCANO
Con respecto a los sensores utilizados no hubo grandes cambios más allá que los cables de conexión son diferentes a los anteriores y hubo que rehacer los conectores de los de sensores utilizados: Los del tipo Reel Switch para detectar posiciones y un sensor de luz, que verán montado en un ladrillo de lego azul. Este sensor tenía la función de detectar el arribo de la bolita a la caja elevadora, ya que ese momento tapaba la luz de entrada, generando un salto voltaico en la interfaz.
REEL SWITCH
Obsérvese en la figura un reel switch y el pequeño magneto de neodimio con forma de botón que lo activa.
Sensor de luz en bloque Lego
Una descripción detallada del funcionamiento de estos sensores puede leerse en mi anterior post, ROBÓTICA EN EDUCACIÓN PARTE I
Otro cambio importante fue causa del tipo de motor utilizado. Los motoreductores, como su nombre lo indican, tienen incorporado un sistema de engranajes que genera una gran reducción de velocidad en el eje y por consiguiente un importante «torque» de giro (Los motores Ignis vienen con diferentes reducciones). Con los antiguos motores, de alta velocidad y torque muy bajo, era necesario construir mecanismos reductores en la salida del eje. Ahora se simplifica el mecanismo, pero la velocidad en algunos casos era tan baja que tuvimos que construir mecanismos aceleradores (Ver mecanismo de la barrera). Es decir que polea motora (la roja de la figura) debe ser más grande que la seguidora.
ESQUEMA POLEA POLEA ACELERADOR
Toda esta preparación previa de los materiales fue tarea de los docentes y técnicos del Laboratorio de Medios.
PREPARACIÓN DE LOS ALUMNOS
El colegio Bayard no es un colegio técnico. El área de robótica está anidada en el área de computación y comienza en 1º grado, con una graduación de objetivos cognitivos enlazados con la programación, la ciencia, la tecnología, la cultura, que culminan con un proyecto constructivo. Si los alumnos de 1º año acompañaron este proceso desde la escuela primaria, llegan con una historia y un conocimiento previo adecuado para lograr un proyecto exitoso, aunque no siempre es así. En esa planificación global es importante 6º grado, ya que el proyecto final de ese curso es construir un robot móvil controlado a distancia por un operador, utilizando material Meccano. Podría decirse que los temas de 1º año son un Upgrade de 6º grado, agregándose la aplicación de sensores para lograr un sistema automatizado, es decir conducido por un procedimiento de control en nuestro caso hecho en Logo.
Dentro 1º año hay también una preparación previa que incluye la construcción y programación de pequeños mecanismos automatizados.
En este proyecto particular el problema principal era recibir la bola en el extremo de la caída, elevarla hasta el tope y depositarla en el plano inclinado superior.
SISTEMAS MECÁNICOS: EL ASCENSOR
Básicamente se construyó un «ascensor» que subía por arrastre de un hilo que se enroscaba en un eje traccionado por un motor a través de un esquema polea polea. En este caso el esquema es levemente reductor porque tenía que soportar el peso del ascensor cuando estaba quieto.
Vistas del mecanismo de arrastre del ascensor
El piso del ascensor no era fijo, sino que basculaba alrededor de un eje. Cuando la bola llegaba, el piso se inclinaba hacia atrás reteniéndola, como puede verse en la figura del sensor de luz, colocada arriba.
Al subir, una tira fijada al techo, fue calibrada para empujar el piso hacia adelante, lo que hacía que la bola saliese de la caja y se depositara en la rampa. La llamaremos «tira de empuje».
Pieza de empuje. Inclina el piso hacia adelante.
Además del cable de arrastre, se pasaron 4 cables por los vértices del ascensor que le servían de guías.
MECANISMO DE BARRERA
Después de varios intentos se logró calibrar la tira de empuje con la distancia adecuada para que la bola cayese en el plano inclinado. Entonces nos dimos cuenta que la velocidad de caída de la bola era mayor que la de descenso del ascensor. Para solucionar este inconveniente construimos una barrera que tenía como objetivo detener la bola, hasta que el ascensor bajara.
Mecanismo de la barrera
Para este mecanismo utilizamos un sistema que habíamos estudiado: el de tornillo. Un eje roscado pasa por una pieza también roscada llamada «manivela» que actúa como una tuerca. El motor hace girar el tornillo, lo que fuerza a la manivela roscada a subir o bajar dependiendo del sentido de giro. Junto con el sistema de arrastre, es una de las 2 formas sencillas de transformar la rotación del motor en una traslación.
Varilla y manivela roscadas
En la figura puede verse la manivela arrastrando a la barrera, con el magneto de botón llegando al Reel Switch.
PROGRAMACIÓN
Si bien la nueva interfaz tiene nuevos comandos, en este proyecto sólo se necesitaron los anteriores comandos que están explicados en un post anterior. El proyecto comenzó en el 2011 con la interfaz anterior y con los motores Meccano, que fue preciso cambiar en el 2012.
SALIDAS Y ENTRADAS DE LA INTERFAZ
Salida 1
Motor ascensor
Salida 2
Motor barrera
Entrada 1
Reel switch – Punto inferior del ascensor
Entrada 2
Reel switch – Punto superior del ascensor
Entrada 3
Reel switch – Punto inferior de la barrera
Entrada 4
Foto resistencia – En la caja del ascensor
Los comandos de robótica aplicados son un desarrollo de Alejandro Lavagnino, programados en FMS LOGO utilizando sus potencialidades para direccionar órdenes a los puertos de comunicaciones. Una descripción de estos comandos pueden encontrarla en mi anterior post «Robótica on top, robótica on tap»
A modo de resumen expliquemos la función de 2 comandos que trabajan con las entradas donde se conectan los sensores.
Voltaje es un reportero que informa el voltaje de la entrada activa.
Tacto es un reportero basado en voltaje que reporta Cierto o Falso, según el Reel esté cerrado o abierto.
PROGRAMACIÓN MODULAR
Para la programación seguimos la metodología modular, programando en primer término las 4 acciones básicas:
bajarbarrera
subirbarrera
bajarascensor
subirascensor.
Luego se identificó la secuencia de estas acciones: bajarbarrera subirascensor espera 200bajarascensor subirbarrera. El espera 200 se colocó para dar tiempo a que el piso basculase y la bola saliese.
Finalmente se discutió qué debía suceder para que la secuencia comenzase. Se midió el cambio de voltaje en la entrada 4 al cambiar la luz incidente con la llegada de la bola. Ese valor era variable de acuerdo a la luz ambiente, en el procedimiento final voltaje < 0.5 significa que la bola se depositó en la caja.
PARA POTENCIAL (Procedimiento principal)
entrada 4
si voltaje < 0.5 [bajarbarrerasubirascensorespera 200 bajarascensor subirbarrera]
bt
ES [Esperando la bola]
Espera 30 POTENCIAL
fin
para bajarbarrera
salida 2
dir.b
e sensarbarrera
fin
para sensarbarrera
entrada 3
si tacto = «verdadero [espera 100 salida 2 a es [Barrera baja] alto] sensarbarrera
fin
para subirascensor
Salida 1
dir.a
ponvolt 10
e
entrada 2
espera 10 sensarsubida
fin
para sensarsubida
si tacto = «verdadero [espera 30 a es[ASCENSOR ARRIBA] alto]
sensarsubida
fin
para bajarascensor
salida 1
dir.b
ponvolt 4
e
entrada 1
espera 10 sensarbajada
fin
para sensarbajada
si tacto = «verdadero [a es[ ASCENSOR ABAJO] alto] sensarbajada
fin
para subirbarrera (Sube por tiempo, no tiene un sensor)
salida 2
ponvolt 12
dir.a
e
espera 300
a
es [barrera arriba]
fin
para ascensor? (Procedimiento informativo no incluido en el procedimiento principal)
entrada 2
si tacto = «verdadero [es [El ascensor está arriba] alto]
entrada 1
si tacto =»verdadero [es[ascensor esta abajo NICEEE] alto]
es [el ascensor se averió por problemas técnicos que están siendo solucionados en este momento, mantenga la calma por favor]
fin
para barrera? (Procedimiento informativo no incluido en el procedimiento principal)
entrada 3
si tacto = «verdadero [es [barrera abajo]]
si tacto = «falso [es[ barrera arriba]]
fin
para luz? (Procedimiento informativo no incluido en el procedimiento principal)
entrada 4
es frase [el voltaje es] formatonumero voltaje 4 3
fin
ESTADO INICIAL
En el estado inicial el ascensor tenía que estar en el punto inferior, la barrera levantada y era necesario medir el voltaje del sensor de luz, pues cambiaba con la luz ambiente. Finalmente se optó por poner una lámpara fija para independizar este valor de los cambios ambientales.
En un momento se pensó también crear un procedimiento de INICIO que estableciese el estado inicial del sistema en forma automática.
AGRADECIMIENTO
Mi agradecimiento al colegio Bayard por permitirme utilizar este material en mi blog y a los queridos alumnos de ahora 3º año que participaron en el proyecto con entusiasmo: Victor, Octavio, Juan Bautista, Francisco, Franco y Fiorella. El vídeo subido a YOUTUBE fue filmado sin los alumnos por una cuestión de seguridad.

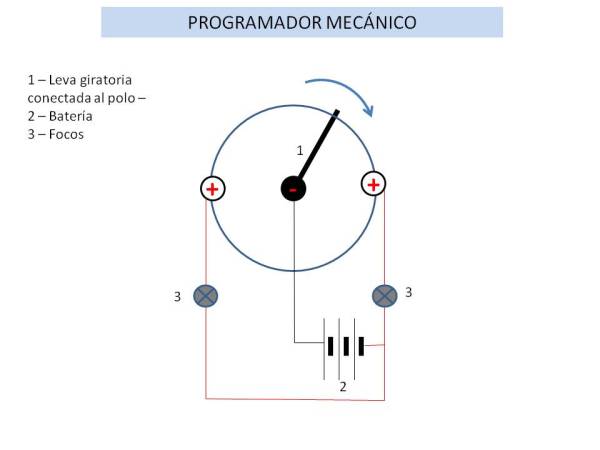
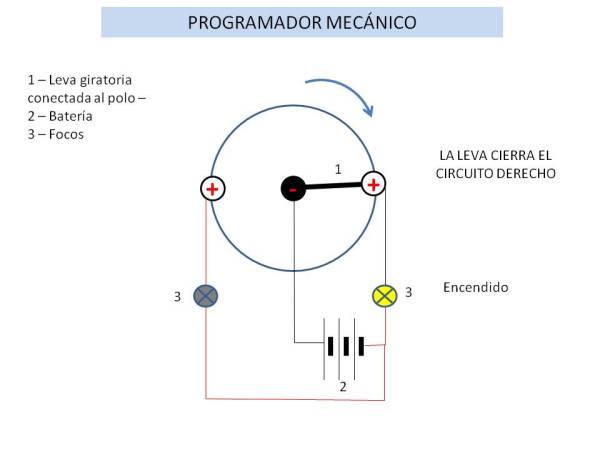
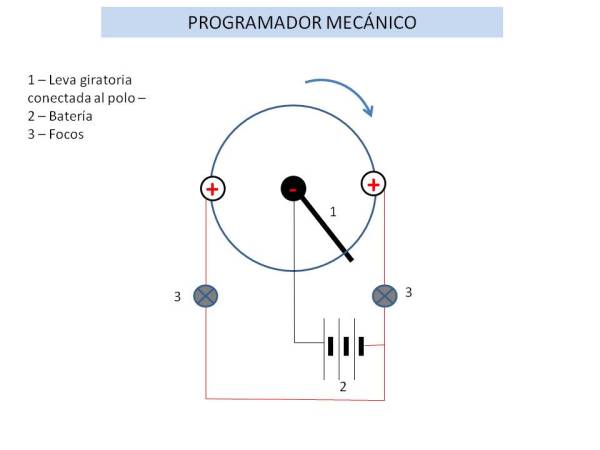
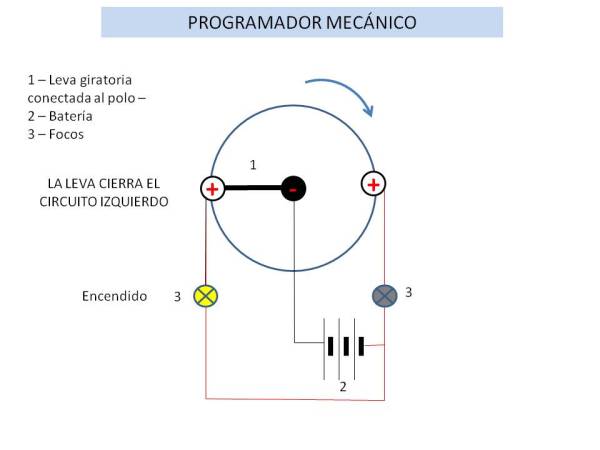
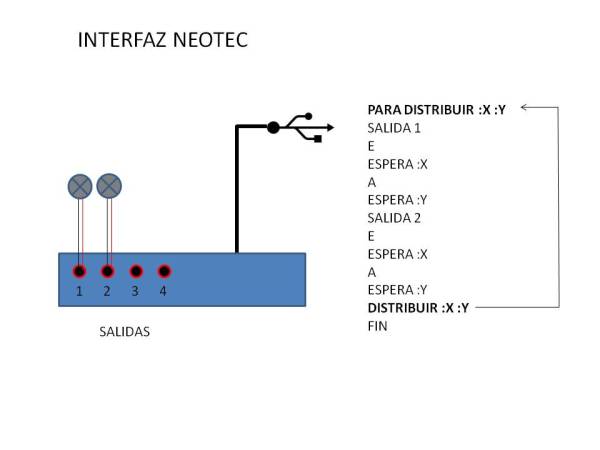 En el procedimiento DISTRIBUIR, :X es una variable que definirá el tiempo de encendido e :Y otra variable que definirá el tiempo de espera entre encendido y encendido. El procedimiento además define que el tiempo de encendido es el mismo para ambos focos (:X) . Por ejemplo se podrá accionar:
En el procedimiento DISTRIBUIR, :X es una variable que definirá el tiempo de encendido e :Y otra variable que definirá el tiempo de espera entre encendido y encendido. El procedimiento además define que el tiempo de encendido es el mismo para ambos focos (:X) . Por ejemplo se podrá accionar: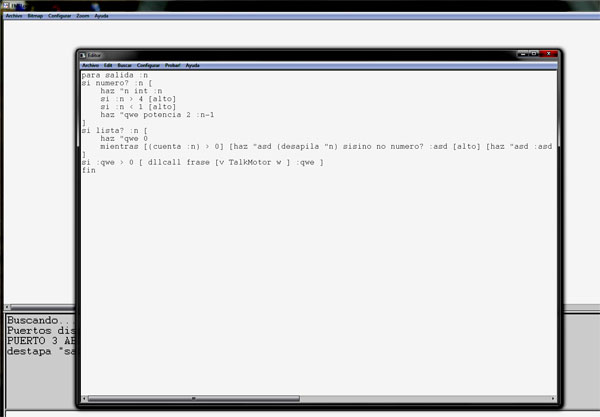
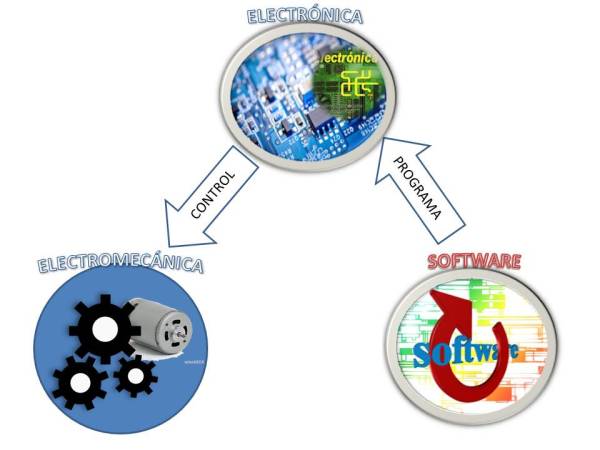

 En la actualidad consta de 5 escuelas y 1 facultad:
En la actualidad consta de 5 escuelas y 1 facultad:
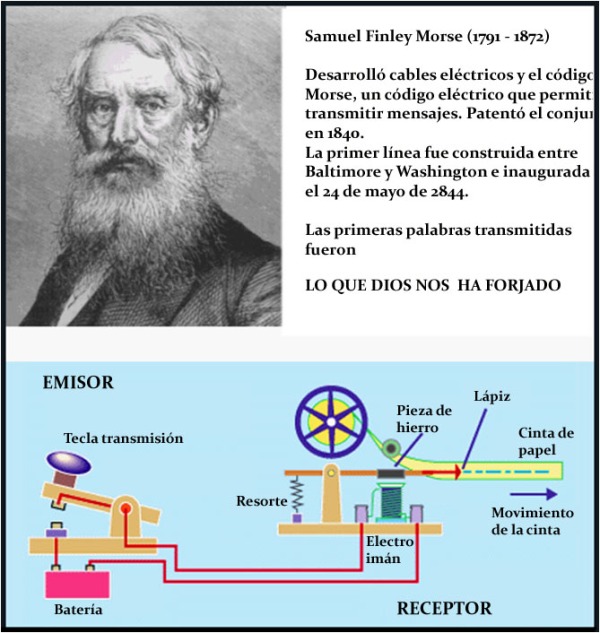
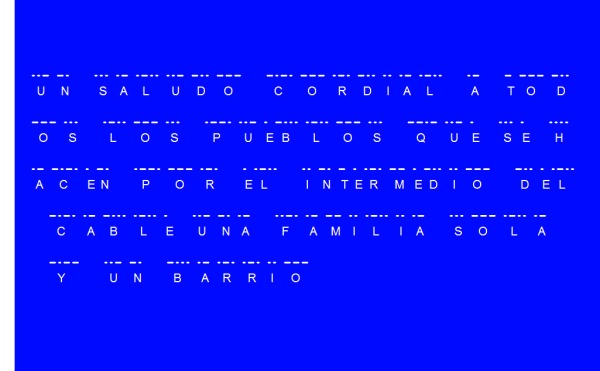
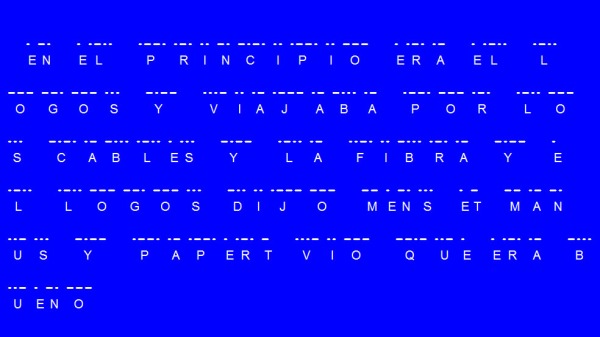
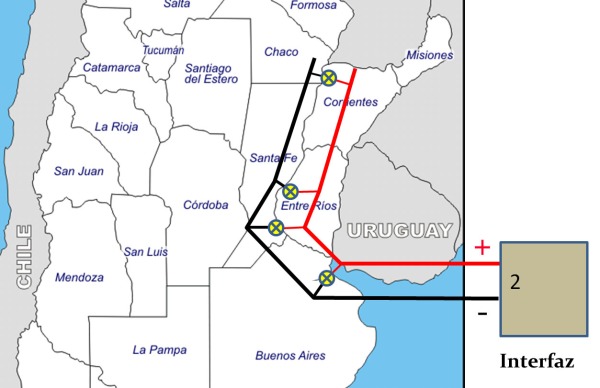

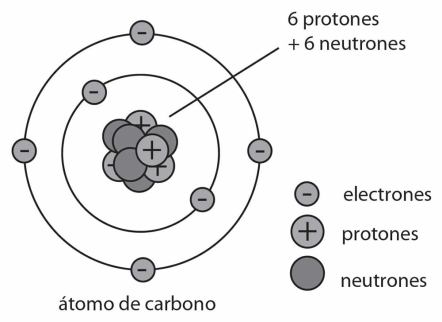
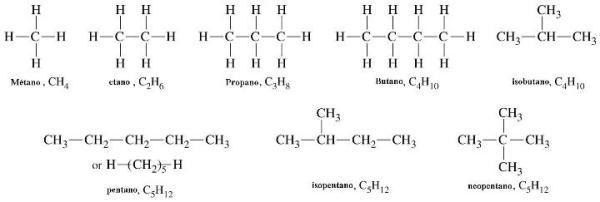
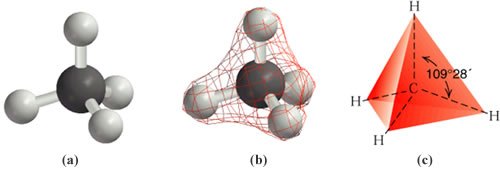
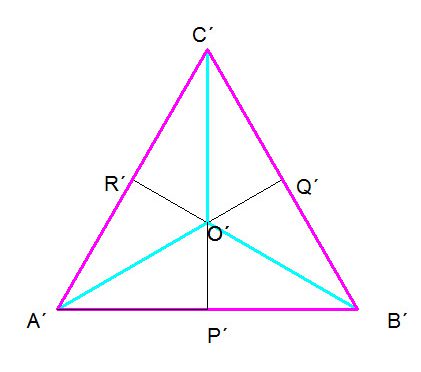
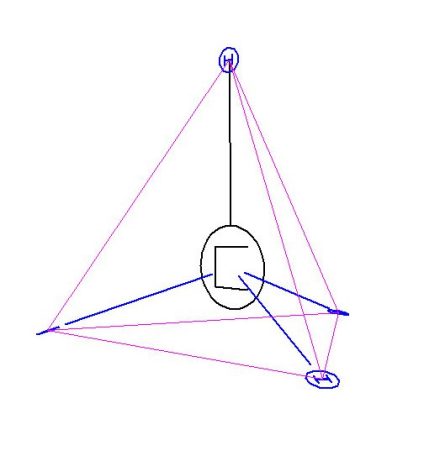
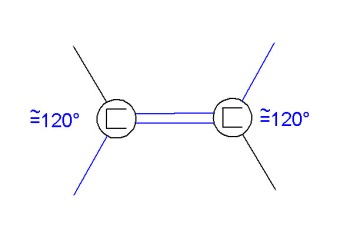 El alqueno más simple es el etileno o eteno (C2H4), uno de los compuestos orgánicos más utilizados. Entre otras funciones es el componente del polietileno. La fórmula molecular de los alquenos es una función del n° de carbonos: CnH2n.
El alqueno más simple es el etileno o eteno (C2H4), uno de los compuestos orgánicos más utilizados. Entre otras funciones es el componente del polietileno. La fórmula molecular de los alquenos es una función del n° de carbonos: CnH2n.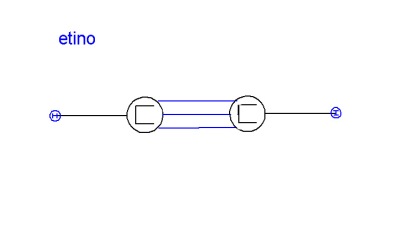 AEI_GEOMETRÍA
AEI_GEOMETRÍA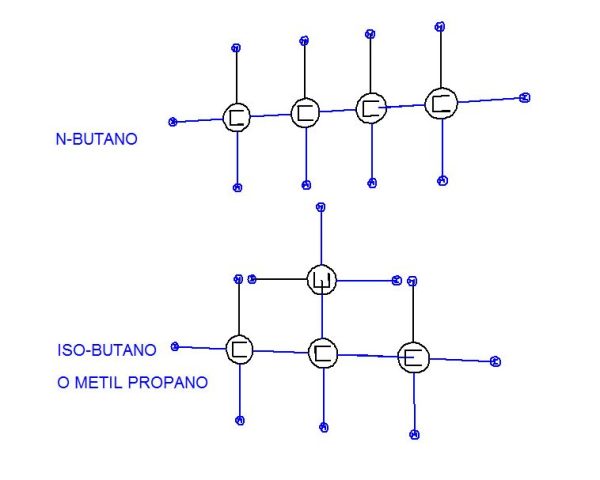
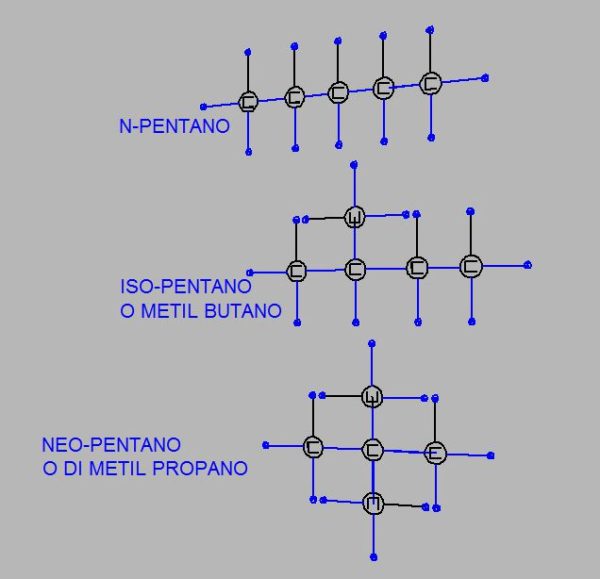
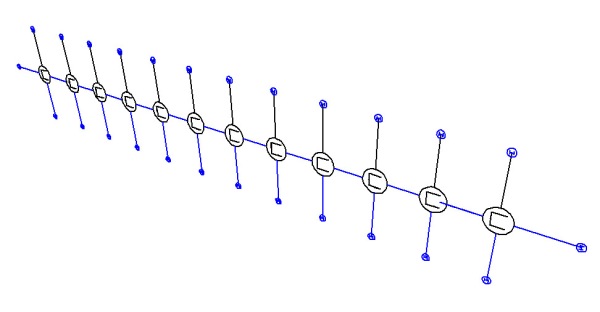
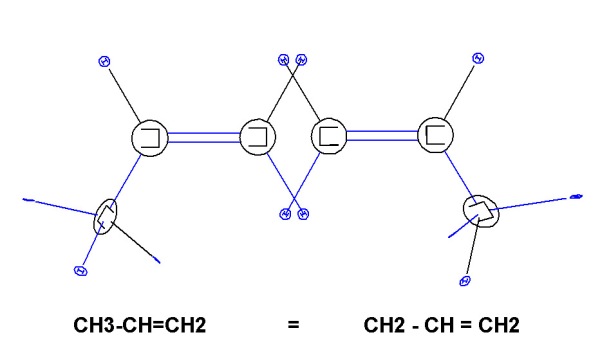
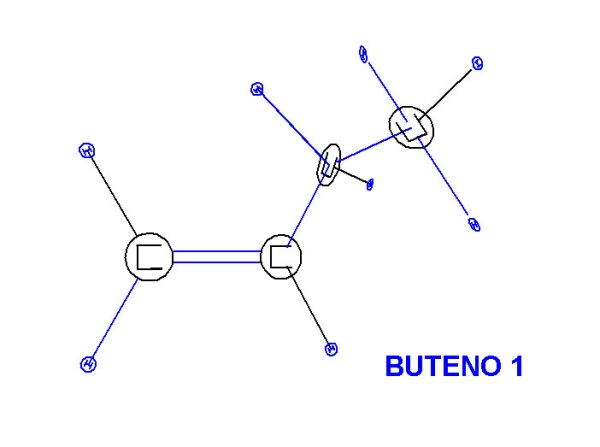 El BUTENO 2 a su vez tiene 2 estereo isómeros el CIS y el TRANS productos de la imposibilidad de rotación del doble enlace.
El BUTENO 2 a su vez tiene 2 estereo isómeros el CIS y el TRANS productos de la imposibilidad de rotación del doble enlace.