
EN EL PRINCIPIO ERA EL LOGOS
Wikipedia sobre el LOGOS:
Heráclito utiliza esta palabra en su teoría del ser, diciendo: «No a mí, sino habiendo escuchado al logos, es sabio decir junto a él que todo es uno.» Tomando al logos como la gran unidad de la realidad, acaso Lo real, Heráclito pide que la escuchemos, es decir, que esperemos que ella se manifieste sola en lugar de presionar. El ser de Heráclito, entendido como logos, es la Inteligencia que dirige, ordena y da armonía al devenir de los cambios que se producen en la guerra que es la existencia misma.
Así también Logo ha sido para mi un organizador del devenir computacional y tecnológico. Una «inteligencia» que ordena y permite darle un valor y una inserción adecuada a las novedades tecnológicas que en su alocada carrera parecen habernos declarado la «guerra». En el recientemente publicado libro «Atrapados» de Nicholas Carr, el autor nos advierte acerca de los riesgos de una tecnología centrada en la eficiencia, la velocidad y la sustitución de las operaciones mentales. Al mismo tiempo alienta una tecnología centrada en las personas, a la que define como aquella que expande nuestras posibilidades, nuestro pensamiento y nuestra acción. En palabras de los fundadores del LOGO diríamos una tecnología que «desafía» y que da «alas» para la mente. Creo que el libro de Carr es imprescindible para entender lo que está pasando con la tecnología y hacia donde puede llevarnos.
LA IMPRESORA 3D
Durante estos 30 años de docencia he presenciado y actuado y a veces sufrido innumerables cambios tecnológicos. La impresora 3D se incorporó al colegio donde trabajo en forma sorpresiva el año pasado y como siempre obligó a una adaptación, capacitación y experimentación para poder asimilarla a nuestro Logos. Por otra parte su tecnología no me era extraña, pues por un lado era un lugar común en los medios de divulgación y por otro lado la evolución de las impresoras y su tecnología es parte de nuestra planificación desde hace años. Me gusta evocar a Lev Vigotzky, el Mozart de la sicología, quien definía la creatividad como un proceso de reelaboración de conceptos, objetos y sistemas preexistentes. La impresora 3D, al menos en su modelo de «inyección» puede pensarse como la resultante de recombinar la conocida tecnología de impresión por inyección de tinta con la sencilla pistola de barra de siliconas. No voy a extenderme en la descripción de su tecnología y si están interesados pueden linkearse al blog del área de computación en https://bayardcreartedigital.wordpress.com/
La impresión 3D es motivadora, pero su tecnología está en pañales y la velocidad de impresión es lenta. El tiempo de impresión depende del tamaño y la densidad del material de la pieza, pero en nuestra experiencia el tiempo promedio de impresión fue de 2 a 3 hs. por pieza (piezas de 5 x 5 x 5 cm). Pero antes de llegar a esta etapa final, está el proceso de graficación de la pieza que se realiza en alguno de los softwares de diseño 3D. En el ejemplo de abajo, vemos la pantalla del programa Rhinoceros, dividida en 4 vistas, XY, XZ, YZ y la perspectiva. Se trata de una aplicación de nivel profesional, que además requiere una maduración perceptiva ya que no es sencillo interpretar las vistas que son abstracciones. Tampoco es sencillo crear una imagen mental en 3D y luego volcarla a la pantalla, aunque la manipulación de objetos es posible mediante numerosos (casi infinitos) automatismos como las operaciones booleanas. Rhinoceros permite además de la comunicación visual, utilizar comandos con parámetros y ésto lo asemeja al LOGO. El archivo generado es leído por el software de impresión, que permite fijar los parámetros de escala, orientación, calidad de impresión y finalmente guardar la información en un archivo llamado CódigoG, que es el que lee la impresora.
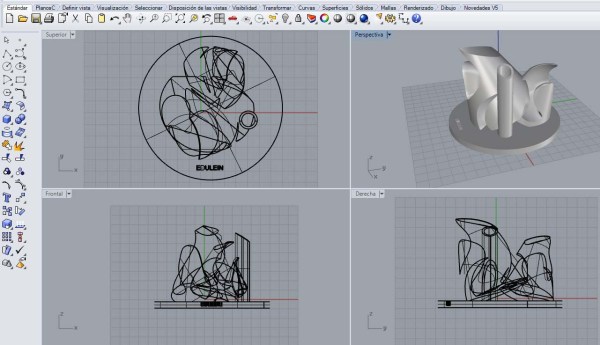
- Vistas de una pieza generada en Rhinoceros

Como siempre, la automatización impide realizar aprendizajes sobre las formas que se generan. Entonces alumnos que no tienen idea de cómo definir un polígono pueden manipular por tanteo objetos 3D. Claro que será difícil que el LOGO 3D pueda competir con estas herramientas, pero en mi experiencia la programación 3D desarrolla la percepción y el pensamiento 3D y facilita la comprensión de las operaciones. Por ejemplo una de las herramientas automatizadas de Rhino es la de «generación de sólidos de revolución», tema sobre el cual he publicado en este mismo blog en LOGO Y LA TORTUGA 3D. Pese a todo sería interesante saber como podría generarse el Código G a partir de una forma generada en LOGO3D.

Formas 3D generada por la tortuga tridimensional en FMS LOGO
CONSTRUCCIÓN DE UN MODELO MECCANO
No exagero si afirmo que se una vez más cumplió la máxima: «Conoce el Logo y luego podrás hacer lo que quieras», parafrasis de «ama y luego haz lo que quieras» de San Agustín.
En este caso particular además, la aproximación a la herramienta como objeto de estudio y de análisis tecnológico estuvo facilitada por la experiencia en robótica. El modelo de impresora adquirido resultó «transparente» y «abierto» a la comprensión de los alumnos por 2 motivos: a) Es un modelo donde casi todos los sistemas electromecánicos están a la vista. b) Muchos de los elementos fueron familiares para los alumnos por experiencias de años anteriores: Motores paso a paso, transmisión por correa, sistema de desplazamiento por tornillo y por correa, sensores de posicionamiento y programación de los mismos.
Introduje el tema de la impresión 3D y el diseño en Rhino en 5° año, donde la planificación es más elástica y el nivel cognitivo de los alumnos es el adecuado para el manejo del software y de la impresora misma. La experiencia fue muy positiva y los alumnos hicieron un excelente trabajo apropiándose de la máquina sin dificultades. No así del Soft que requiere mucho más tiempo de elaboración y objetivos específicos para desarrollarlos.
El cabezal de la impresora se mueve en los 3 ejes merced a motores paso a paso. Además el filamento plástico es empujado por un sistema de engranajes movidos por otro motor paso a paso. En la punta del cabezal una resistencia funde el filamento y deposita una gota que se endurece rápidamente. Gota a gota se rellena una capa, luego asciende en Z y genera la capa superior. Así hasta completar la pieza. Un video institucional muestra el proceso de impresión:
MODELO MECCANO DEL EJE Z
Ante el entusiasmo despertado seleccioné un grupo de alumnos voluntarios para construir un modelo en Meccano que emulase el movimiento del cabezal en el eje Z (arriba y abajo).
La impresora posee un sistema de control que entre otras cosas permite activar los motores en los 3 ejes, expulsar el filamento, calentar la base, modificar parámetros, etc. Todo mediante selección de menúes anidados activados por una perilla y un botón. Los desplazamientos en los 3 ejes son referenciales, es decir están referidos a una posición denominada ORIGEN. De manera que la programación requiere la determinación del punto de origen y la memorización de la posición en que se encuentra.

Modelo Meccano movimiento Eje Z

El motor paso a paso utilizado tiene un paso angular de 3,6°, es decir que 100 pasos son necesarios para girar 1 vuelta. El tornillo tiene además un paso que es la distancia entre 2 puntos iguales de su estría.
Una mariposa roscada del mismo paso con el tornillo se hace pasar por el mismo. Cuando el tornillo gira 1 vuelta, la mariposa se desplaza 1 paso de tornillo hacia Z o -Z según el sentido de la rotación.
En nuestro caso, el tornillo Meccano tiene un paso tan pequeño que el desplazamiento era imperceptible. Por esta razón se construyó un sistema de engranajes que aceleraba la velocidad de rotación del motor en 2 etapas.
Empíricamente se determinó que 100 pasos angulares provocaban un desplazamiento aproximado de 55 mm. Por lo tanto 1 paso angular = 55/100 mm.
PROGRAMACIÓN LOGO DEL SISTEMA
Los comandos de robótica son automatismos realizados en FMS LOGO que facilitan la comunicación con la interfaz. Ya he comentado la mayoría de ellos, pero en el caso de los motores paso a paso hay 2 comandos importantes específicos de los motores PAP.
PAP x (donde x = 1 ó 2) que selecciona la salida de tensión donde se conecta el motor. Por razones complicadas de explicar un motor paso a paso utiliza 2 salidas.
PAPPASOS x que determina la cantidad de pasos que se quiere dar.
Luego los comandos ya conocidos:
E (Encender: Envía voltaje a la salida activa)
A (Apagar: Interrumpe el voltaje en la salida activa)
PONVOLT X (Fija el voltaje de la salida activa entre 1 y 12 volts)
DIR.A y DIR.B son los nombres de las direcciones de rotación. En este caso DIR.A era descender
PROCEDIMIENTOS GENERADOS
PARA ORIGEN
PAP 2
PONVOLT 10
DIR.A
E
ENTRADA 1 (Donde está conectado el sensor de posición)
SENSAR (Procedimiento recursivo que sensa el valor de voltaje de la entrada activada)
MAKE «MIPOS 0 (Define la memoria MIPOS con valor 0 pues está en el ORIGEN)
FIN
Un sensor es un dispositivo que modifica el voltaje de la entrada de acuerdo a un cambio. El sensor de posición es básicamente un interruptor, tiene 2 estados: Abierto o cerrado. Cuando está abierto el voltaje es 0 (cero) cuando se cierra es 5 Volts (aproximadamente).
PARA SENSAR
SI VOLTAJE > 4,5 [A SOUND ALTO] (Cuando se cierra el switch Apaga el motor y hace un sonido)
SENSAR
FIN
PARA SOUND
PLAYWAVE «DING 0
FIN
Mucho más complejo y esforzado para los alumnos fue la programación del programa MM que le indica al brazo a qué posición referencial debe ir.
PARA MM :X
SI :X < 0 [ES [VALOR NO PERMITIDO] ALTO]
SI :X > 100 [ES [VALOR EXCEDIDO] ALTO]
SI :X = :MIPOS [ES [Ya estoy en esa posición] ALTO] (Estos 3 condicionales validan la entrada)
MAKE «milimetros :X – :MIPOS (Almacena el cálculo de cuántos mm tiene que desplazarse respecto de dónde está)
MAKE «pasos :milimetros *100/5.5 (Calcula la cantidad de pasos que debe dar el motor para que la rosca se desplace los mm calculados)
PAP 2
PONVOLT 10
SI :milimetros > 0 [DIR.B] (Si mm es positivo tienen que subir)
SI :milimetros < 0 [DIR.A] (Si mm es negativo tienen que bajar)
PAPPASOS ABS :pasos (Indicación de cuántos pasos tiene que dar)
E (Encender, con esto comienza a girar los pasos)
MAKE «mipos 😡 (Define la nueva posición)
(ES [Estoy en] :mipos)
FIN
PRODUCCIÓN, EXPERIENCIA Y CONTROL
No sé que deparará el futuro de la educación, ni qué roles cumplirá la tecnología en ella. Ni siquiera puedo proyectar lo que pasará en mi colegio, después de todo en un par de años mi carrera docente habrá terminado. Me gusta pensar que como tantas otras cosas engullidas por el devenir del tiempo las impresoras pasarán, pero el Logos permanecerá. No soy optimista, pero esta experiencia que en definitiva duró 6 clases y algo más para la preparación de la muestra CREARTEC 2014 me regocijó al ver a los alumnos comprender y dominar lo nuevo montándose en sus conocimientos previos.
La impresora 3D está de moda y se promueve a diario como una herramienta de producción (Mano protésis), pero para el Logos es otra cosa. Dice Nicholas Carr en el final de su estupendo libro: Al reclamar nuestras herramientas como parte de nosotros, como instrumentos de experiencia en lugar de meros medios de producción, podemos disfrutar la libertad que ofrece la tecnología grata cuando nos expande el mundo. Es la libertad que, imagino, debieron de sentir Lawrence Sperry y Emil Cachin aquel luminoso día de primavera en París, hace cien años, tras subirse a las alas de su biplano Curtiss C-2 equilibrado por un giroscopio y, desbordados de terror y alegría, pasaron por encima de la tribuna y vieron debajo de ellos, los rostros de la gente mirando el cielo asombrados.
Otra vez la imagen de las «alas» para la «mente». Y por cierto que no mirando el cielo, sino la mesa de la presentación, los padres, docentes y alumnos, observaron asombrados a los alumnos que se apropiaron de esta tecnología y la convirtieron en una herramienta de experimentación y creación personal.
![]()
