AUTOMATISMO = POR SÍ MISMO
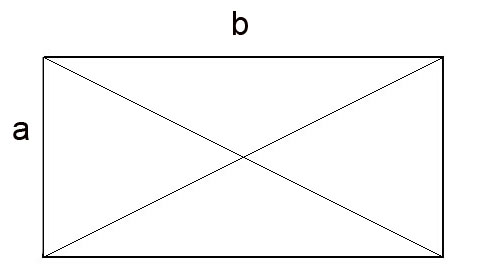
La automatización, que puede definirse como un proceso que se controla por sí mismo, sin necesidad de un control directo humano, no es nueva. Hace muchos años que las luces del alumbrado público se encienden automáticamente al anochecer. El distribuidor del sistema de encendido de un auto, es un programa mecánico que envía tensión eléctrica a las bujías en un orden y en un momento exacto para producir una explosión en la mezcla combustible. Un esquema simplificado del funcionamiento de un distribuidor mecánico con 2 focos lo representamos con 4 posiciones:
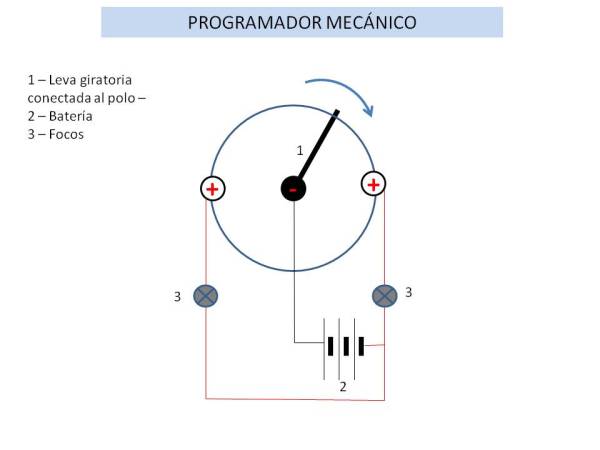
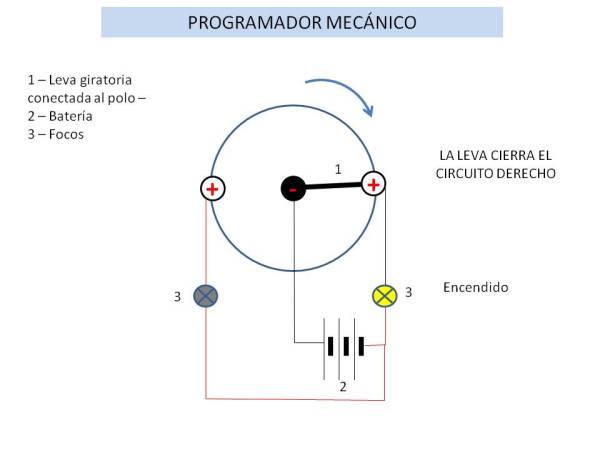
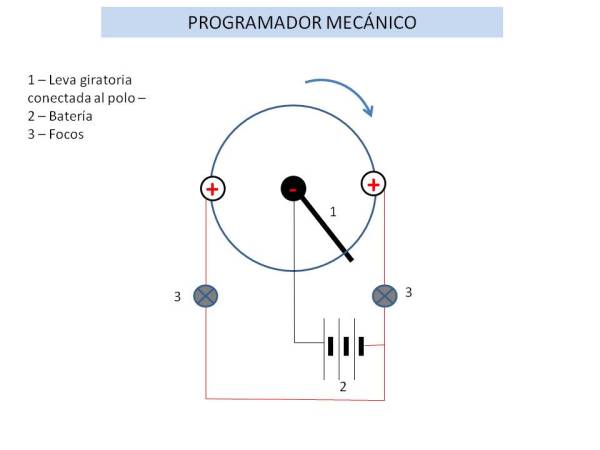
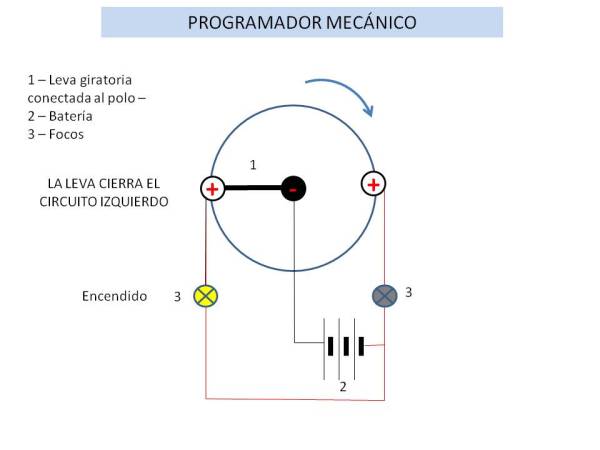
La leva conectada al polo negativo gira y al tocar el contacto positivo cierra el circuito. Alternadamente se cierra el izquierdo y luego el derecho. La velocidad de giro determinará el tiempo que tarda en encender y el tiempo que dura el encendido.
Un distribuidor de un auto tiene 4 circuitos, 1 por cada bujía. El eje central gira mecánicamente cerrando y abriendo serialmente uno a uno los circuitos. Esto es lo que llamamos un «programador mecánico», que automatiza una secuencia de encendidos.
En nuestro contexto de robótica, donde utilizamos una interfaz con salidas para los focos y un lenguaje basado en FMS LOGO que llamamos NEOTEC, donde se han definido una cantidad de seudo primitivas para comunicarse con la interfaz, el proceso anterior sería reemplazado por un procedimiento:
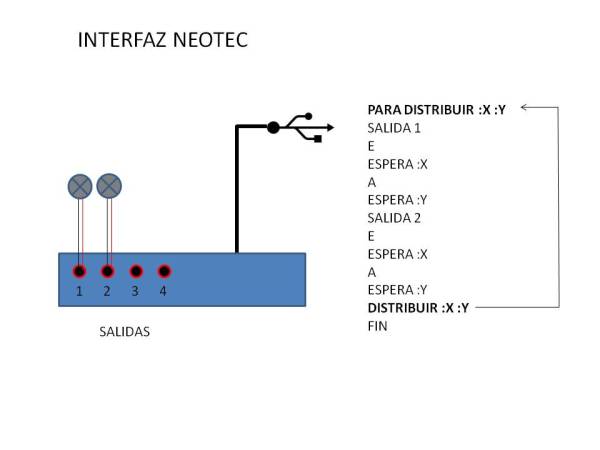 En el procedimiento DISTRIBUIR, :X es una variable que definirá el tiempo de encendido e :Y otra variable que definirá el tiempo de espera entre encendido y encendido. El procedimiento además define que el tiempo de encendido es el mismo para ambos focos (:X) . Por ejemplo se podrá accionar:
En el procedimiento DISTRIBUIR, :X es una variable que definirá el tiempo de encendido e :Y otra variable que definirá el tiempo de espera entre encendido y encendido. El procedimiento además define que el tiempo de encendido es el mismo para ambos focos (:X) . Por ejemplo se podrá accionar:
DISTRIBUIR 10 100
DISTRIBUIR 100 1000
Finalmente DISTRIBUIR es un ciclo, loop o recursión que equivale a la rotación (loop) de la leva mecánica.
SEUDOPRIMITIVAS
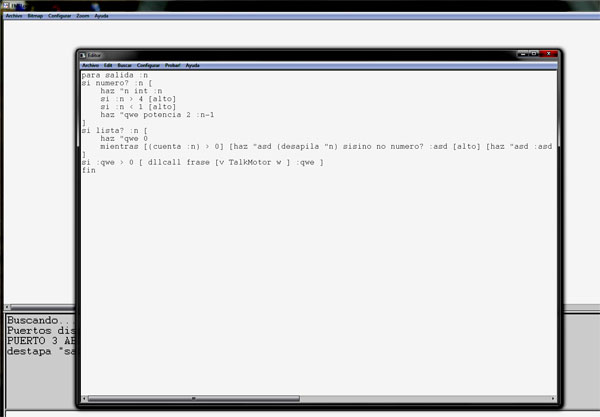
Se denominan así comandos (o automatismos) que se ocultan a la vista del programador, mediante el comando TAPA (Bury) y que se pueden utilizar como «primitivas» sin riesgo de que sean modificadas por el usuario. Por ejemplo la seudoprimitiva SALIDA, cuya función es activar una de las salidas de tensión, tiene la siguiente definición:
PARA SALIDA :n
si numero? :n [
haz «n int :n ; el valor de n solo puede ser entero, podría poner salida 2.5 pero equivaldría a salida 2
si :n > 4 [alto]; las salidas son 4 y los valores permitidos son 1, 2, 3 y 4
si :n < 1 [alto]; las salidas son 4 y los valores permitidos son 1, 2, 3 y 4
haz «qwe potencia 2 :n-1
]
si lista? :n [ ; pueden activarse 2 o más salidas. Por ejemplo SALIDA [1 4]
haz «qwe 0
mientras [(cuenta :n) > 0] [haz «asd (desapila «n) sisino no numero? :asd [alto] [haz «asd :asd – 1] si :asd < 0 [alto] si :asd > 3 [alto] haz «qwe :qwe + potencia 2 int(:asd) si miembro? :asd :n [quita :asd :n]]
]
si :qwe > 0 [ dllcall frase [v TalkMotor w ] :qwe ] ;llamada a ejecutar una DLL
FIN
En el caso de las seudoprimitivas E (encender) y A (apagar) que funcionalmente son un interruptor que se abren y cierran el circuito de la salida previamente activada, el código es:
PARA E
dllcall [v MotorOn]
fin
PARA A
dllcall [v MotorCoast]
fin
Donde MotorOn Y MotorCoast son DLLs previamente programadas y almacenadas en un archivo DLL.
Como se puede observar el proceso de comunicación no es muy amigable. De manera que la seudoprimitiva permite al docente «programador», si fuese necesario, acercar el nivel de dificultad a la capacidad del alumno «programador». Cada primitiva LOGO (AV RE GD GI) tiene la misma función. Como todo automatismo se trata de lograr ejecutar un proceso complejo mediante una comunicación simple: una palabra o un click. Un interrogante del docente construccionista es si el automatismo sirve para que el alumno potencia su pensamiento o si lo sustituye al punto que no hay que pensar.
Las seudoprimitivas a diferencia de las primitivas pueden «visualizarse» mediante el comando DESTAPA. Por ejemplo si escribimos: DESTAPA [SALIDA], y luego vamos al editor veremos:
LOS PILARES DE LA AUTOMATIZACIÓN DIGITAL
La automatización digital ha reemplazado los automatismos electromecánicos por sistemas electrónicos. los 3 pilares de la automatización son ahora:
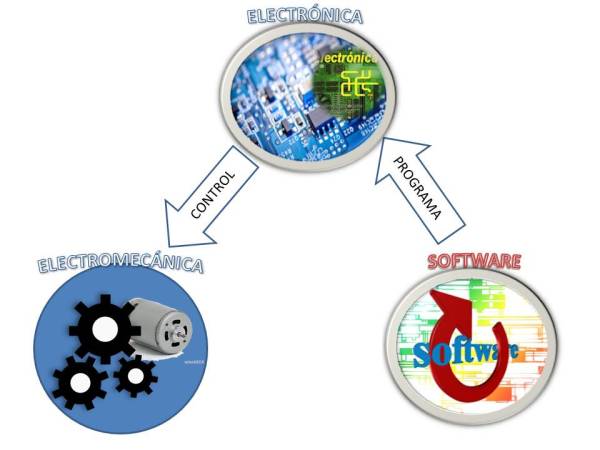
La ELECTROMECÁNICA es la fuerza bruta. La que multiplica el esfuerzo del hombre, o sustituye sus músculos y herramientas. Es heredera de la Revolución Industrial.
La ELECTRÓNICA es la física de los circuitos miniaturizados de baja tensión, y del lenguaje eléctrico digital. Su función es controlar la electromecánica. Es heredera de la Revolución del Transistor.
Finalmente el SOFTWARE es el lenguaje con que se programa la ELECTRÓNICA para que controle la MECÁNICA. No es novedosa, pero es actualmente la preocupante heredera de la Inteligencia Artificial. Así como las máquinas reemplazaron al hombre en sus funciones mecánicas, los Sistemas Inteligentes lo están reemplazando en sus funciones superiores. Como dice Nicolas Carr en su perturbador libro ATRAPADOS, los pilotos de avión ya no controlan los aviones, sino a las computadoras que controlan los aviones. En un futuro no muy lejano, quizás también sean reemplazados por las máquinas inteligentes.
EL CAMINO DE LA ROBÓTICA EDUCATIVA
Casi puedo ver los «engranajes» que movieron al Dr. Seymour Papert a crear el contexto de aprendizaje que denominamos Robótica Educativa: «Los engranajes de su infancia», el «construccionismo» donde la tecnología es virtuosa si provee mejores caminos para el aprendizaje, los proyectos y conclusiones de la entonces naciente Inteligencia Artificial, los postulados del constructivismo, el ideario del MIT, «Mens et manus» (Mente y manus). La resultante casi obvia e inexorable fue la «robótica educativa», de la que el lenguaje Logo fue una primer etapa, ya que obviamente la tortuga fue la representación virtual de un tipo de robot y el Logo un lenguaje amigable para programarla (Software).
En este contexto de aprendizaje, me inicié en el año 1988 y fui modelando una pedagogía, una didáctica y una secuencia de dificultades partiendo de los proyectos constructivos (manus) que fuimos resolviendo con los alumnos, así como del entorno en que desarrollo mi profesión.
VIDEO: LOS INICIOS DE LA ROBÓTICA EDUCATIVA (1988 – 1990)
En este contexto fascinante está implícitos y/o explícitos los 3 pilares de la automatización digital, cuyos contenidos incluyen a los de la robótica, de manera tal que un proyecto de automatización puede no tener nada que ver con un robot.
PILAR IMPLÍCITO: LA ELECTRÓNICA
En forma implícita está la electrónica. Me muevo en un colegio que no es «técnico» y yo tampoco lo soy. No trabajamos con los alumnos «la electrónica», ésta está contenida en la interfaz (y por supuesto en la PC). La interfaz es una «caja negra», un instrumento del que no sabemos qué pasa dentro, o mejor dicho sabemos lo que pasa al nivel de Input y Output, lo que entra y lo que sale. Lo que no sabemos y está guardado celosamente en los circuitos, es el cómo.
SALIDAS Y ENTRADAS
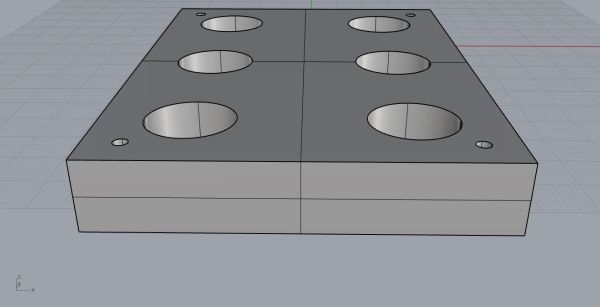
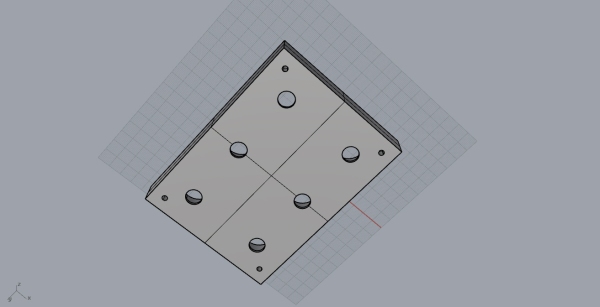
La interfaz actual se conecta a la PC a través de un puerto USB. Tiene 4 salidas de tensión (entre 1 y 12 volts), con inversión de polaridad. Los conectores son del tipo minidin y permiten la conexión de focos, leds, electroimanes, bombas de agua, motores, servomotores, motores paso a paso y servomotores (aunque en este caso su funcionamiento no es confiable). En principio estos dispositivos deben funcionar con un tope de 12 Volts. Pero veremos que gracias al RELAY, que es un elemento que permite controlar un circuito de alta tensión (220 Volts) mediante un circuito de baja tensión (12 Volts), es posible conectar casi cualquier aparato eléctrico (ventilador, luz ambiente, radio, calentador) siempre y cuando el consumo no supere los 2 Amperes.
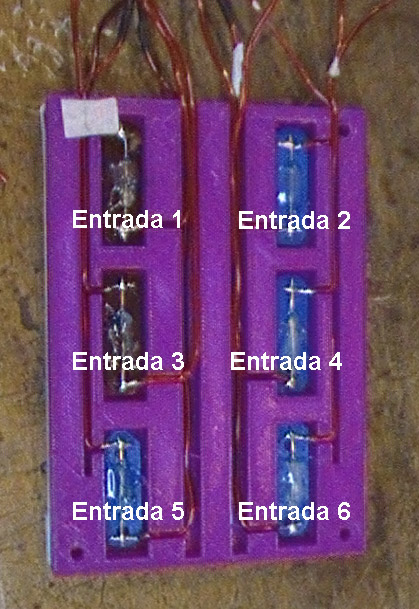
A la derecha de la imagen pueden verse el sector con las 6 ENTRADAS, con conectores plugs, que permiten la conexión de sensores del tipo resistivos: posición (interruptores), temperatura, luz, proximidad y casi cualquier variable que provoque un cambio en la resistividad y por lo tanto un cambio del voltaje interno de la interfaz.

PILAR EXPLÍTICO: EL SOFTWARE
Como ya expliqué los alumnos trabajan con un lenguaje creado por los docentes (y expertos en programación) basado en el FMS LOGO, que entre otras funciones tiene la posibilidad de comunicarse con los puertos de E/S. Este «post lenguaje» bautizado NEOTEC permite la programación de la electromecánica conectada a las SALIDAS de tensión y de los sensores conectados a las ENTRADAS.
El post lenguaje se adiciona a todo el lenguaje del FMS LOGO y por supuesto mantiene el paradigma modular tan útil tanto para la programación en sí, como para la formación de un pensamiento organizado.
PILAR EXPLÍCITO: LA ELECTROMECÁNICA
Desde 1° grado están presentes los contenidos de electricidad y construcción. En 5° grado se introduce a los alumnos en los mecanismos: sus componentes, sus funciones y aplicaciones y su construcción. En 5° utilizando material Lego y a partir de 6° grado, con material Meccano.
AUTOMATIZACIÓN
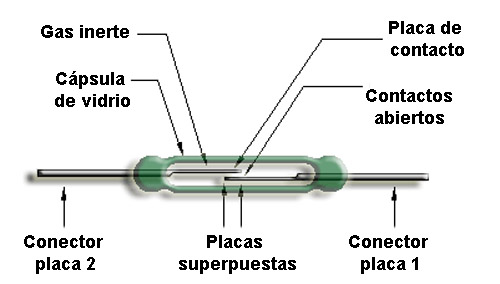
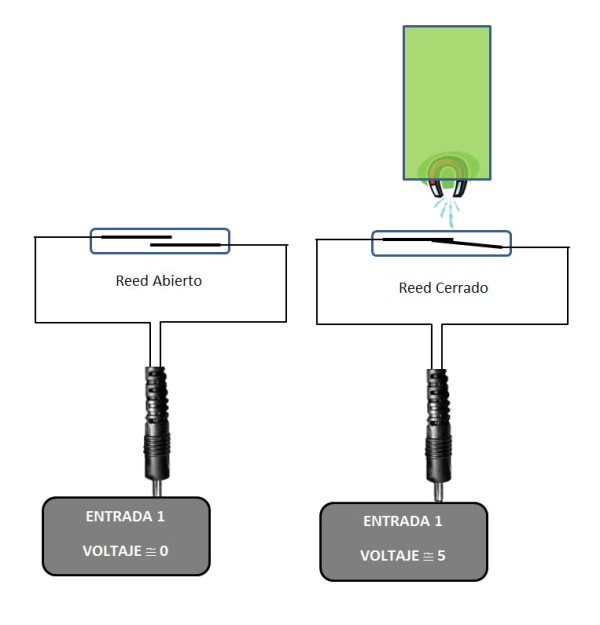
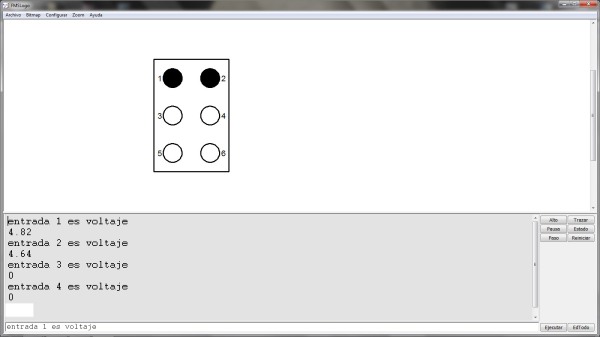
Este contenido se empieza a trabajar en 1° año con la aplicación casi exclusiva de sensores de 2 estados (interruptores), que funcionan como sensores de posición o de fin de carrera. Estos sensores tienen 2 estados: cerrado y abierto. Cerrado la tensión interna es de aproximadamente 5 Volts y abierto es de aproximadamente 0 Volts. El comando (seudoprimitiva) esencial para la programación con sensores es VOLTAJE que reporta la tensión de la entrada activa. Por ejemplo el procedimiento TESTEASENSORES:
|
PARA TESTEASENSORES ENTRADA 1 ES VOLTAJE |
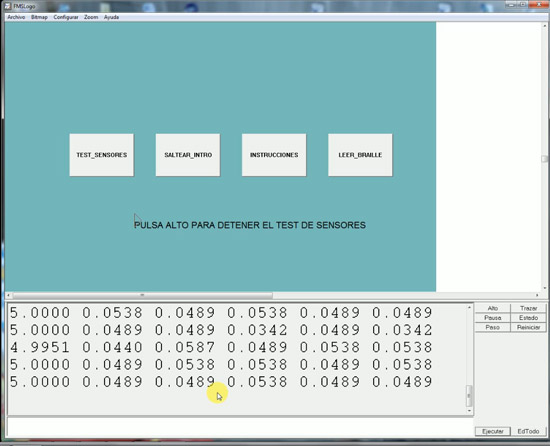
Si quisiera que los 4 valores se escribiesen en una sola línea:
PARA TESTEASENSORES ENTRADA 1 MAKE «V1 VOLTAJE |
|
Podría obtener el siguiente resultado Los 4 valores corresponden al voltaje de una de las entradas y son todos aproximadamente 0. |
0.0034 0.0041 0.0039 0.0044 |
PROYECTOS CONSTRUCTIVOS EN 1° AÑO
Los proyectos que llevamos a cabo tienen siempre un componente lúdico, un contenido geo social y/o basado en sistemas reales. Por ejemplo una maqueta automatizada del transbordador Nicolás Avellaneda ubicado en el barrio de la Boca. (VER VIDEO: TRANSBORADOR)
PROYECTOS CONSTRUCTIVOS EN 2° AÑO
En 2° año se introducen sensores resistivos cuyo voltaje es una función del estímulo (luz, temperatura, proximidad, acidez, etc.) y puede tomar valores entre 0 y 5 volts. En estos proyectos la complejidad mecánica cede paso a la complejidad de la programación. (VER VIDEO: CRIATURAS SENSIBLES)
3° AÑO – AUTOMATIZACIÓN Y CONTROL AMBIENTAL
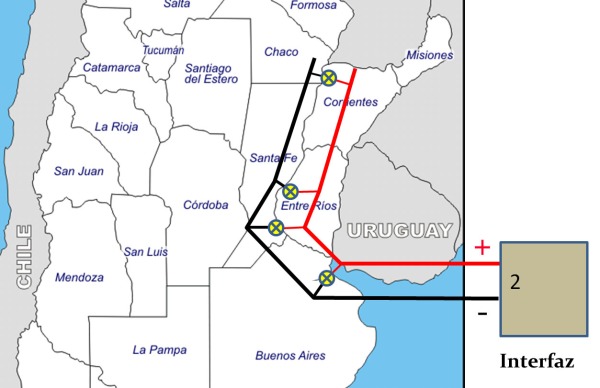
Finalmente en 3° año se aplican todo tipo de sensores para automatizar el control de un ambiente. Siempre basado en un sistema real: por ejemplo el sistema de manteniniento por frío de las momias del Llullailaco, construido en el Museo de Alta Montaña de Salta o el que describo a continuación basado en el sistema de igualación de temperaturas en el Observatorio La Silla, emplazado en el cerro homónimo en el desierto de Atacama, Chile. En esta etapa la programación incluye la creación de memorias globales para almacenar datos, las comparaciones múltiples y ciclos anidados en ciclos.
En el primer video presentamos la problemática general del observatorio e incluye trabajos de animación que recrean la situación.
En el segundo, la forma que adoptó el proyecto de construcción (quizás incompleto o más que nada simbólico dado el tiempo disponible), su programación y funcionamiento.
VIDEO 1: INTRODUCCIÓN
VIDEO 2: REPRESENTACIÓN MECÁNICA Y PROGRAMACIÓN
ACLARACIÓN: Quizás no haya quedado claro la función del foco interior y su relación con el Sol. Lo que presento es una simulación de la problemática del Observatorio que se debe ejecutar en un tiempo sensiblemente inferior al de 24 hs. Podríamos haber utilizado un foco externo a modo de «Sol», pero a diferencia del obervatorio real construido con materiales que absorben el calor con velocidad, nuestro «domo» es de telgopor, un aislante térmico. Por otro lado el calentamiento del interior debía producirse en cuestión de minutos. Por esa razón reemplazamos el «Sol» por un foco adentro del domo. que cumple la función de calentar el interior de la construcción con bastante velocidad.
4° AÑO. CONTROL DE EXPERIENCIAS
Finalmente nuesta secuencia finaliza orgánicamente en 4°, con la aplicación de sensores y la programación de un toma de datos prolongada en el tiempo dentro de una experiencia, frecuentemente relacionada con el intercambio de calor, debido en parte al buen funcionemiento obtenido con los sensores termoresistivos.
Pero eso es material para otro POST.
En el campo educativo quizás falte mencionar otros pilares: La imaginación y su soporte, el conocimiento. El conocimiento nos permite ver lo que no se ve, e imaginar como podría ser. Fue lo que me pasó cuando visité el MAAM (Museo de Alta Montaña) en la ciudad de Salta y quedé maravillado por la exposición y la historia de las momias del Llullaillaco. Enseguida empecé a imaginar cómo podríamos recrear ese increíble sistema de conservación con los conocimientos y materiales que teníamos. El conocimiento tecnológico, fue en este caso claramente potenciador y no sustituyente. Como en el caso del Observatorio, permitió activar MENS ET MANUS.
 En la actualidad consta de 5 escuelas y 1 facultad:
En la actualidad consta de 5 escuelas y 1 facultad:

 niverso de aplicaciones.
niverso de aplicaciones.


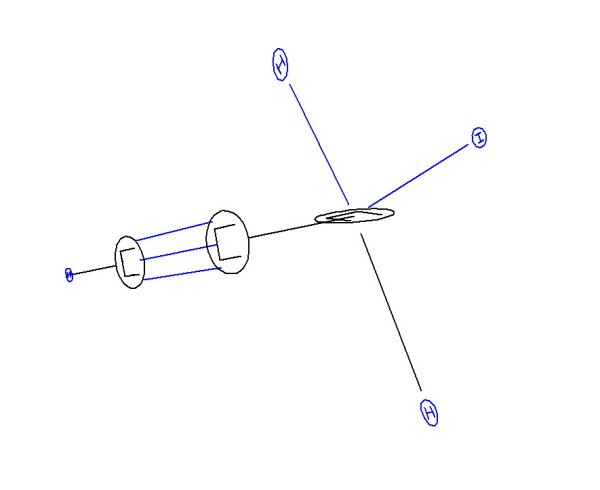
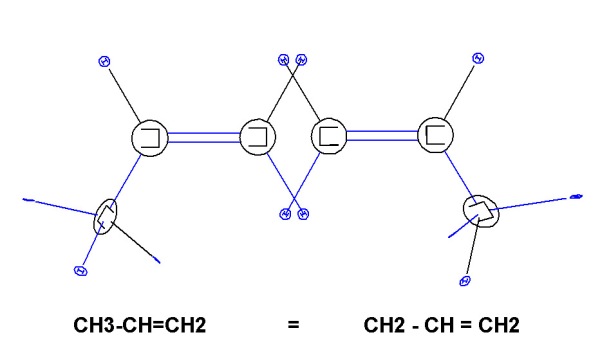
 El alqueno más simple es el etileno o eteno (C2H4), uno de los compuestos orgánicos más utilizados. Entre otras funciones es el componente del polietileno. La fórmula molecular de los alquenos es una función del n° de carbonos: CnH2n.
El alqueno más simple es el etileno o eteno (C2H4), uno de los compuestos orgánicos más utilizados. Entre otras funciones es el componente del polietileno. La fórmula molecular de los alquenos es una función del n° de carbonos: CnH2n.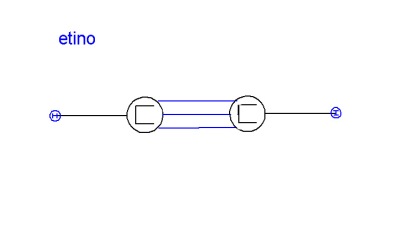 AEI_GEOMETRÍA
AEI_GEOMETRÍA
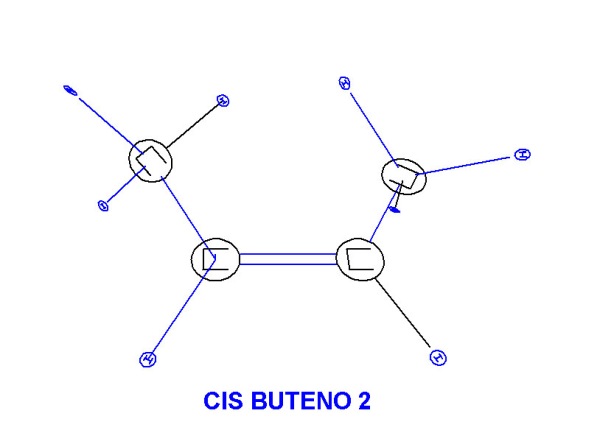
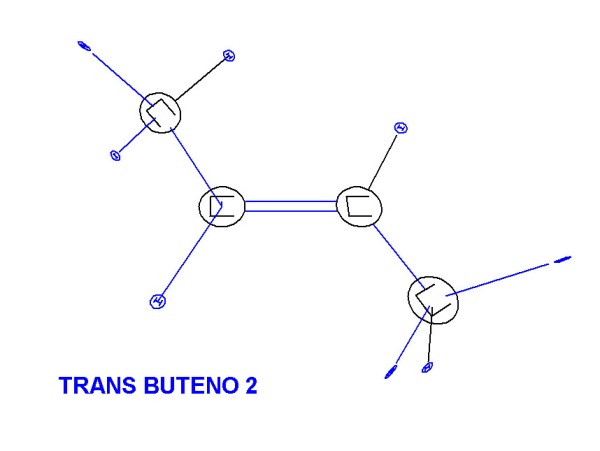
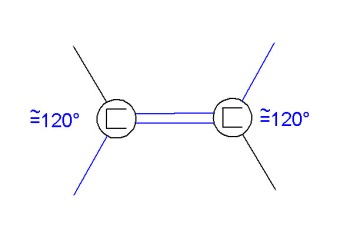
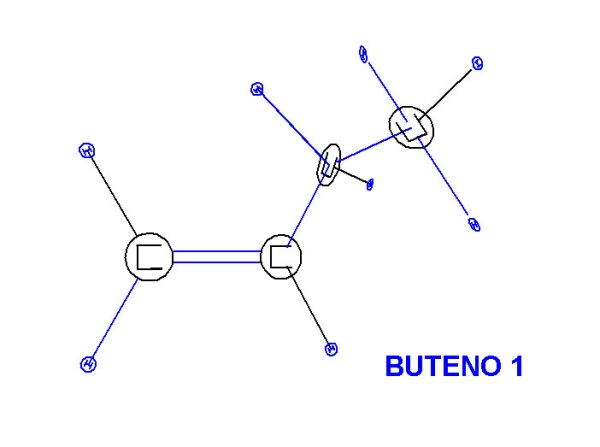 El BUTENO 2 a su vez tiene 2 estereo isómeros el CIS y el TRANS productos de la imposibilidad de rotación del doble enlace.
El BUTENO 2 a su vez tiene 2 estereo isómeros el CIS y el TRANS productos de la imposibilidad de rotación del doble enlace.